Compensazione risposta di un sensore
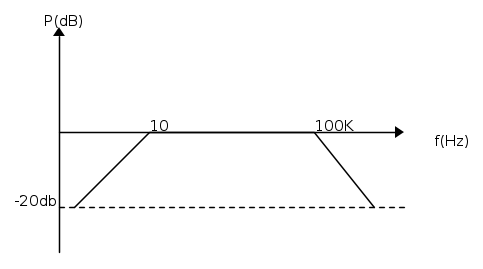
Sto risolvendo una tema d'esame. Un sensore ha la seguente risposta in frequenza
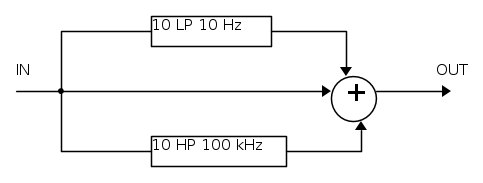
dopo averne campionato la tensione in uscita dal sensore, devo fare un filtro digitale del primo ordine che ne compensi la risposta in frequenza. Nelle soluzioni del tema d'esame, c'è questo:
Dove quindi sopra c'è un passa basso con frequenza di taglio a 10 Hz che in continua guadagna 10, la stessa notazione si ripete sotto. Il corrispondente analogico del filtro passa-basso pertanto sarebbe questo:
 = 10 \frac{2 \pi}{2\pi + s}")
Ora, mi spiegate perché dovrebbe funzionare? Con il passa-basso, supponendolo ideale e quindi che tagli a pendenza infinita, mi prendo la parte di spettro da 0 Hz a 10 Hz, quindi tutta la retta che sta salendo. A questa retta ci sommo 20dB (che corrisponde a moltiplicare per 10 in lineare), quindi in uscita dal filtro mi trovo la stessa retta traslata da
[0Hz : -20dB ; 10Hz - 0dB] in uscita dal sensore (in entrata nel filtro, IN nella figura)
a
[0Hz : 0dB ; 10Hz - +20dB] in uscita dal filtro passa basso.
Ora se anche sommassi alla risposta originaria cosa ottengo? Cioè non capisco perché questa soluzione funziona.
dopo averne campionato la tensione in uscita dal sensore, devo fare un filtro digitale del primo ordine che ne compensi la risposta in frequenza. Nelle soluzioni del tema d'esame, c'è questo:
Dove quindi sopra c'è un passa basso con frequenza di taglio a 10 Hz che in continua guadagna 10, la stessa notazione si ripete sotto. Il corrispondente analogico del filtro passa-basso pertanto sarebbe questo:
Ora, mi spiegate perché dovrebbe funzionare? Con il passa-basso, supponendolo ideale e quindi che tagli a pendenza infinita, mi prendo la parte di spettro da 0 Hz a 10 Hz, quindi tutta la retta che sta salendo. A questa retta ci sommo 20dB (che corrisponde a moltiplicare per 10 in lineare), quindi in uscita dal filtro mi trovo la stessa retta traslata da
[0Hz : -20dB ; 10Hz - 0dB] in uscita dal sensore (in entrata nel filtro, IN nella figura)
a
[0Hz : 0dB ; 10Hz - +20dB] in uscita dal filtro passa basso.
Ora se anche sommassi alla risposta originaria cosa ottengo? Cioè non capisco perché questa soluzione funziona.
=\frac{j\omega}{1+j\omega}")

") la risposta all'impulso del sistema A, in funzione del tempo
la risposta all'impulso del sistema A, in funzione del tempo") la trasformata di Laplace di
la trasformata di Laplace di ") la trasformata di Fourier di
la trasformata di Fourier di _{dB} = 20 \log_{10} (\|h_A(s)\|)")
 indica la convoluzione
indica la convoluzione = h_A(t) * h_B(t)")
 = h_A(s) \cdot h_B(s)")
 = h_A(f) \cdot h_B(f)")
_{dB} = h_A(s)_{dB} + h_B(s)_{dB}")
 = h_A(t) + h_B(t)")
 = h_A(s) + h_B(s)")
 = h_A(f) + h_B(f)")
_{dB} = 20 \log_{10}(\| h_A(s) + h_B(s) \|) = ???")
_{AB}") ,
,