Barriera infrarossi per modellismo
Salve a tutti.
Sto realizzando un sistema per il controllo dei segnali ferroviari su un plastico.
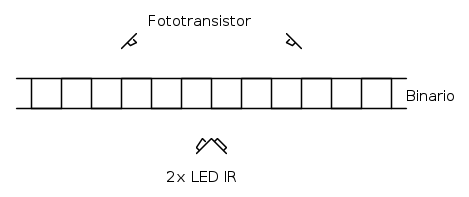
In pratica ho un binario sezionato su cui un treno può scorrere in entrambe i sensi di marcia. Questo "tratto" presenta una zona sezionata che permette l'arresto del treno all'interno del tratto. Alle estremità della sezione vi sono due segnali, uno alla destra e uno alla sinistra della sezione e ancora più in esterno alla sezione vi sono i sensori a barriera. Avevo pensato di realizzare la logica di funzionamento tramite un PIC. Per quanto riguarda l'algoritmo ho preparato già un applicativo in C# che simula il funzionamento del circuito che poi dovrò convertire nel linguaggio per il PIC (ed anche qui mi servirà una mano).
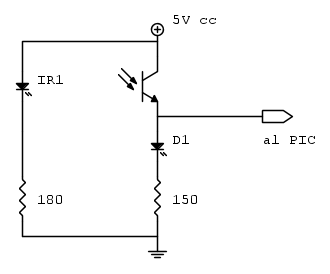
Prima però di affrontare la parte PIC, avevo intenzione di iniziare dai sensori a barriera. Ho abbozzato questo schema:
Per quanto riguarda il fototransistor e il diodo led infrarosso, le specifiche sono quelle nei file allegati.
In pratica se ho realizzato bene il tutto, quando non vi è niente tra IR1 e il fototransistor, questo dovrebbe andare in conduzione e quindi riportarmi sull'uscita "al PIC" i 5V di alimentazione e accendere il led D1 utilizzato sia per il controllo sia per verificare l'allineamento. Quando invece il fascio è interrotto dal treno, dovrebbe darmi in uscita 0V (riferimento di massa). Spero sia corretto.
Sto realizzando un sistema per il controllo dei segnali ferroviari su un plastico.
In pratica ho un binario sezionato su cui un treno può scorrere in entrambe i sensi di marcia. Questo "tratto" presenta una zona sezionata che permette l'arresto del treno all'interno del tratto. Alle estremità della sezione vi sono due segnali, uno alla destra e uno alla sinistra della sezione e ancora più in esterno alla sezione vi sono i sensori a barriera. Avevo pensato di realizzare la logica di funzionamento tramite un PIC. Per quanto riguarda l'algoritmo ho preparato già un applicativo in C# che simula il funzionamento del circuito che poi dovrò convertire nel linguaggio per il PIC (ed anche qui mi servirà una mano).
Prima però di affrontare la parte PIC, avevo intenzione di iniziare dai sensori a barriera. Ho abbozzato questo schema:
Per quanto riguarda il fototransistor e il diodo led infrarosso, le specifiche sono quelle nei file allegati.
In pratica se ho realizzato bene il tutto, quando non vi è niente tra IR1 e il fototransistor, questo dovrebbe andare in conduzione e quindi riportarmi sull'uscita "al PIC" i 5V di alimentazione e accendere il led D1 utilizzato sia per il controllo sia per verificare l'allineamento. Quando invece il fascio è interrotto dal treno, dovrebbe darmi in uscita 0V (riferimento di massa). Spero sia corretto.