Servocomando sensibile
Ho un servocomando modellistico tradizionale, analogico.
Per ottenerne l'uso "a verricello" ho scollegato il movimento del trimmer interno (che normalmente e' collegato al motore) e ho usato un motore piu' lento ma con piu' coppia.
Il risultato e' quasi quello voluto: muovendo lo stick in un senso il motore gira in senso antiorario, muovendo lo stick nell'altro senso il motore gira in senso orario, sempre proporzionale a quanto si spinge lo stick, realizzando appunto un verricello.
Il problema e' che il motore che ho usato inizia a muoversi con pochissima tensione, ed e' quasi impossibile tenerlo veramente fermo. Anche usando le regolazioni "fini" del radiocomando, a stick fermi il motore si muove pianissimo in un senso o nell'altro.
Questo motore e' pesantemente demoltiplicato (roba da 300:1) quindi anche se c'e' un carico meccanico se ne strefrega... lui si muove!
Mi chiedo: come potrei realizzare una specie di soglia sotto cui non fare arrivare nessuna tensione al motore?
Qualcosa cioe' da interporre fra eletronica del servo e il motore
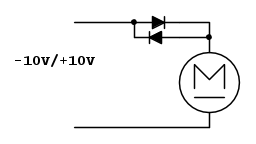
Due diodi in antiparallelo funzionerebbero?
In questo caso la tensione verrebbe abbassata della tensione caratteristica del diodo, quindi fino a 0.6-0.7V il motore non dovrebbe muoversi.
Oppure devo per forza fare un controllo a soglia con un comparatore?
Tenete presente che al motore arriva una bella onda quadra a dutycicle variabile, se non ricordo male.
Per ottenerne l'uso "a verricello" ho scollegato il movimento del trimmer interno (che normalmente e' collegato al motore) e ho usato un motore piu' lento ma con piu' coppia.
Il risultato e' quasi quello voluto: muovendo lo stick in un senso il motore gira in senso antiorario, muovendo lo stick nell'altro senso il motore gira in senso orario, sempre proporzionale a quanto si spinge lo stick, realizzando appunto un verricello.
Il problema e' che il motore che ho usato inizia a muoversi con pochissima tensione, ed e' quasi impossibile tenerlo veramente fermo. Anche usando le regolazioni "fini" del radiocomando, a stick fermi il motore si muove pianissimo in un senso o nell'altro.
Questo motore e' pesantemente demoltiplicato (roba da 300:1) quindi anche se c'e' un carico meccanico se ne strefrega... lui si muove!
Mi chiedo: come potrei realizzare una specie di soglia sotto cui non fare arrivare nessuna tensione al motore?
Qualcosa cioe' da interporre fra eletronica del servo e il motore
Due diodi in antiparallelo funzionerebbero?
In questo caso la tensione verrebbe abbassata della tensione caratteristica del diodo, quindi fino a 0.6-0.7V il motore non dovrebbe muoversi.
Oppure devo per forza fare un controllo a soglia con un comparatore?
Tenete presente che al motore arriva una bella onda quadra a dutycicle variabile, se non ricordo male.