Già che ci siamo, facciamo due esempi semplici.
1) Consideriamo un punto materiale di massa

in
quiete rispetto a un riferimento rotante. In questo caso, sia la velocità che l'accelerazione rispetto a tale riferimento sono nulle, ovvero

e

Sostituendo nell'equazione del moto
")
si ha
")
da cui
")
che, se

e

sono ortogonali, si riduce a

Quindi, in questo caso, perché il punto materiale possa stare in quiete
rispetto a un sistema di riferimento rotante deve essere soggetto a una forza
centripeta .
2) Consideriamo ora l'esempio dato da
 carloc
carloc e supponiamo che il punto si muova lungo un raggio con velocità
costante 
, dove

è un vettore di modulo unitario diretto come
.
Rispetto al riferimento rotante, l'accelerazione è ancora nulla, quindi
che sostituita nell'equazione del moto dà
-m\boldsymbol{\omega}\times(\boldsymbol{\omega}\times \boldsymbol{r})")
da cui
+m\boldsymbol{\omega}\times(\boldsymbol{\omega}\times \boldsymbol{r}) \\ &= 2m\omega u (\boldsymbol{\hat{\omega}}\times\boldsymbol{\hat{r}})+m\boldsymbol{\omega}\times(\boldsymbol{\omega}\times \boldsymbol{r})\end{align}")
Il termine
")
è, a meno del segno, la forza di Coriolis e, come diceva
carloc, è perpendicolare sia al raggio che alla velocità angolare (per le proprietà del prodotto vettoriale).
Questo termine nasce perché il punto materiale è in moto rispetto a un sistema di riferimento rotante. Il termine
")
è di nuovo la forza centripeta.
NB: in questi due esempietti ho supposto che un punto materiale avesse un certo moto predefinito
rispetto a un sistema di riferimento rotante e mi sono chiesto a quale forza dovesse essere soggetto il punto per avere quel particolare moto. In molti casi, invece, si opera al contrario: si conoscono le forze che agiscono su un punto e ci si chiede quale sia il suo moto rispetto a un sistema di riferimento rotante (p.es. uno solidale con la Terra). Quindi, la forza
centripeta è la forza necessaria per mantenere in rotazione il punto materiale; la forza
centrifuga e la forza di Coriolis sono forze fittizie che si aggiungono alle forze esterne nell'equazione del moto scritta rispetto a un sistema di riferimento rotante.



 , e poi pensa di avere un punto che si muove solidalmente al cerchio lungo uno dei suoi raggi
, e poi pensa di avere un punto che si muove solidalmente al cerchio lungo uno dei suoi raggi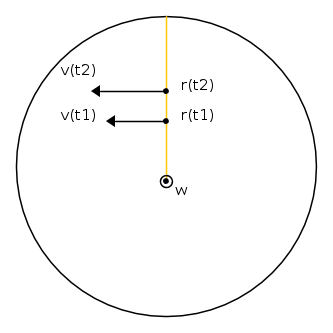
 .... per far variare la velocità ci vuole un'accelerazione
.... per far variare la velocità ci vuole un'accelerazione 