Moto circolare non uniforme
Salve a tutti,
vorrei semplicemente un chiarimento sull'interpretazione della seguente traccia:
Io l'ho svolto così:

^2\left (\Delta t \right )^2r")
^2r^2+ \left (\frac{d\omega}{dt} \right )^4\left (\Delta t \right )^4r^2}=\left ( \frac{d\omega }{dt} \right )r\sqrt{1+\left (\frac{d\omega}{dt} \right )^2\left (\Delta t \right )^4}")
Praticamente ho inteso "accelerazione angolare pari a ", come modulo dell'accelerazione solo tangenziale. Andrebbe specificato o è sempre implicito? Non vorrei sbagliare poi per interpretare male le tracce.
", come modulo dell'accelerazione solo tangenziale. Andrebbe specificato o è sempre implicito? Non vorrei sbagliare poi per interpretare male le tracce.
Grazie
vorrei semplicemente un chiarimento sull'interpretazione della seguente traccia:
La piattaforma di una giostra parte da ferma con accelerazione angolare pari a
Calcola il modulo dell'accelerazione di un punto che distadall'asse di rotazione.
Io l'ho svolto così:
Praticamente ho inteso "accelerazione angolare pari a
", come modulo dell'accelerazione solo tangenziale. Andrebbe specificato o è sempre implicito? Non vorrei sbagliare poi per interpretare male le tracce.Grazie
") con polo nel centro di rotazione vedi che le componenti polari dell'accelerazione sono
con polo nel centro di rotazione vedi che le componenti polari dell'accelerazione sono

 e quindi
e quindi
 e
e
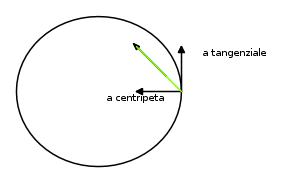
 , quella radiale
, quella radiale  e le componenti radiali e tangenziali dell'accelerazione.
e le componenti radiali e tangenziali dell'accelerazione. ? In generale, per evitare ambiguità, meglio specificare.
? In generale, per evitare ambiguità, meglio specificare.