Collegare Motori a Pic18 Pierin
Buon giorno a tutti, nevica davvero forte qua :)
Ho un problemino......ho costruito un robot col lego comandato da 4 motori (sempre del lego) ai quali ho tagliato i fili per poterli collegare al PIC Pierin e quindi farli andare a modo mio.
Se il problema fosse farli girare in un solo senso potrei risolvere tutto con un relè.
Ma siccome a me servono funzionanti in entrambi i sensi mi serve un consulto :)
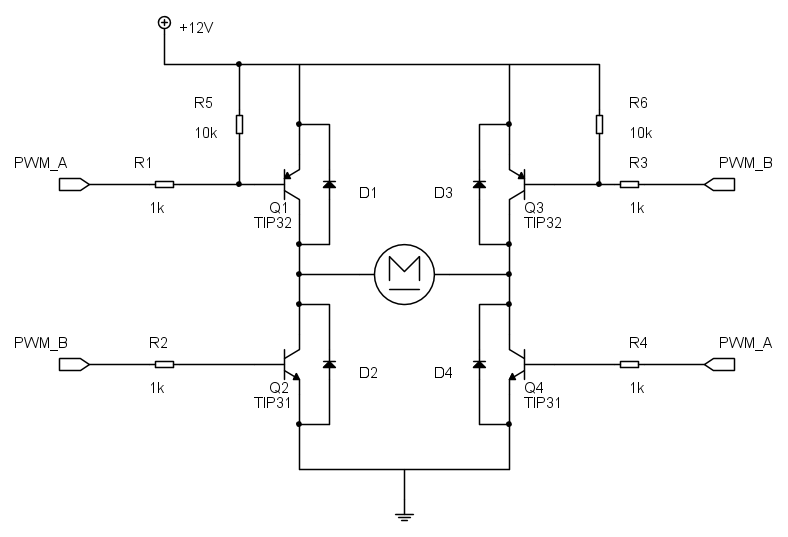
Ho provato col circuito in figura allegato ma poco da fare. Le correnti che i transistor lasciano passare non sono sufficienti a dare al motore una buona potenza.
Il circuito funziona utilizzando 2 uscite digitali del PIC (quelle a sinistra) che, alternativamente, accendono i transistor Q1 e Q4 oppure Q2 e Q3. Questo mi permette di averli giranti in entrambi i sensi. Siccome i motori piccoli del lego non assorbono oltre 250-300mA il problema sta che non riesco a fare saturare i transistor (BC337). Questo perché dal PIC escono 3,3V mentre l'alimentazione del restante circuito avviene a 12V.
Non posso usare operazionali perché a bordo del robot non c'è un'alimentazione duale.
(I transistor sono tutti BC337 e le resistenze da 1.2k) I motori sono quelli lego small power function technics.
Ho un problemino......ho costruito un robot col lego comandato da 4 motori (sempre del lego) ai quali ho tagliato i fili per poterli collegare al PIC Pierin e quindi farli andare a modo mio.
Se il problema fosse farli girare in un solo senso potrei risolvere tutto con un relè.
Ma siccome a me servono funzionanti in entrambi i sensi mi serve un consulto :)
Ho provato col circuito in figura allegato ma poco da fare. Le correnti che i transistor lasciano passare non sono sufficienti a dare al motore una buona potenza.
Il circuito funziona utilizzando 2 uscite digitali del PIC (quelle a sinistra) che, alternativamente, accendono i transistor Q1 e Q4 oppure Q2 e Q3. Questo mi permette di averli giranti in entrambi i sensi. Siccome i motori piccoli del lego non assorbono oltre 250-300mA il problema sta che non riesco a fare saturare i transistor (BC337). Questo perché dal PIC escono 3,3V mentre l'alimentazione del restante circuito avviene a 12V.
Non posso usare operazionali perché a bordo del robot non c'è un'alimentazione duale.
(I transistor sono tutti BC337 e le resistenze da 1.2k) I motori sono quelli lego small power function technics.