Connessione RS-485 tra due PIC
Ciao a tutti, qualche mese fa in una discussione su come rilevare temperature a distanza mi è stato consigliato di utilizzare un connessione seriale RS-485 tra due PIC.
Il primo PIC "master" invia dei byte, il secondo "slave" una volta interrogato, risponde con i dati che ha rilevato.
Ora vorrei provare a realizzare questa connessione, boiler mi aveva consigliato di procurarmi due LTC1487 e di provare in tanto con una connessione RS-233, cosi ho fatto.
boiler mi aveva consigliato di procurarmi due LTC1487 e di provare in tanto con una connessione RS-233, cosi ho fatto.
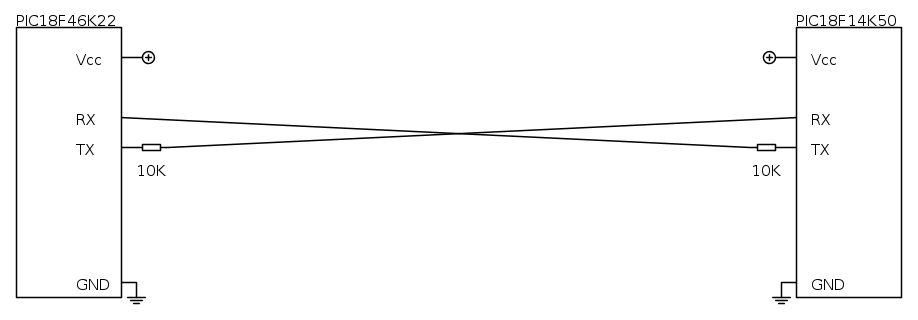
Prova connessione RS-233:
Codice del PIC18F46K22 "master"
Codice del PIC18F14K50 "slave"
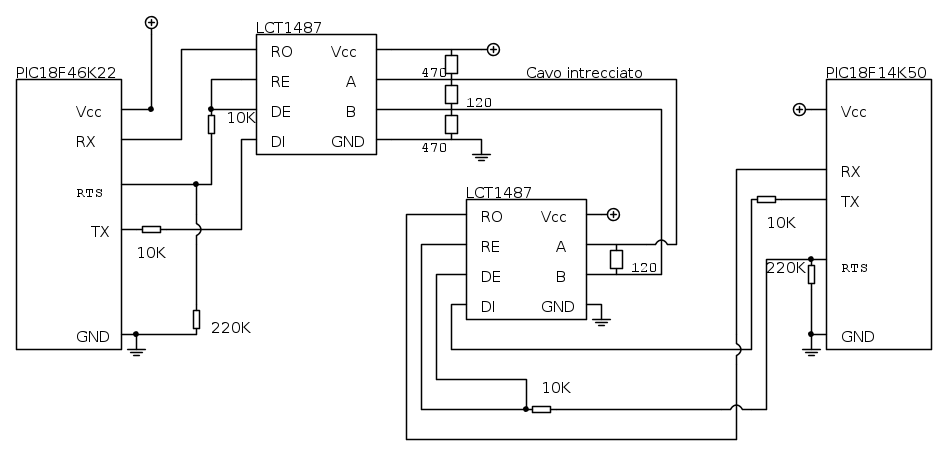
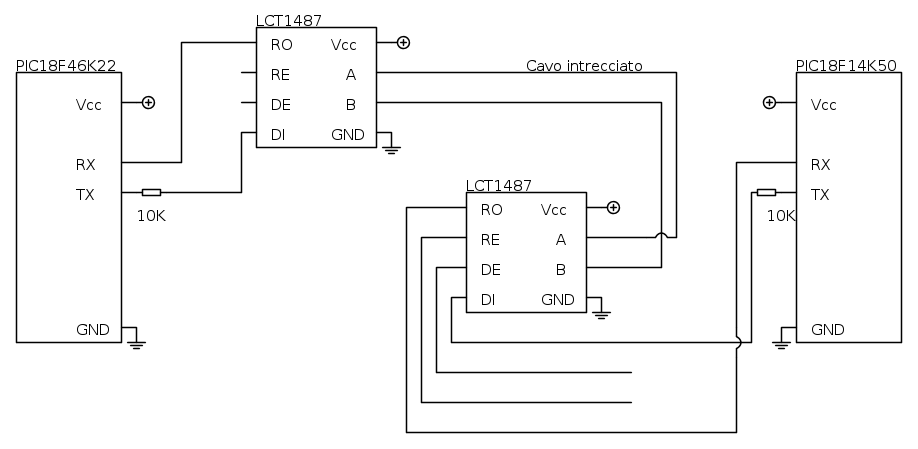
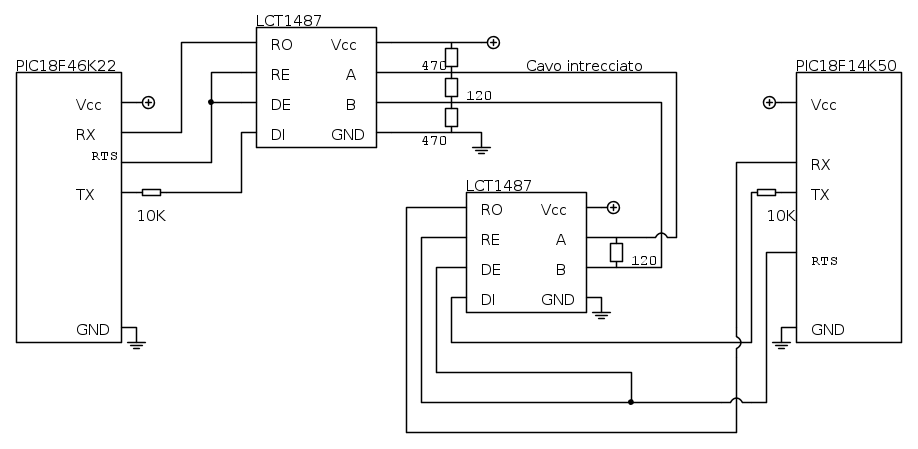
....e questo funziona ora dovrei provare a realizzare la connesione RS-485 collegando i ltc1487 ai miei PIC, ma ho qualche dubbio,
io ho provato qualcosa del genere ma non ho ben capito a cosa vadano collegati RE e DE.
Qui c'è il datasheet http://pdf1.alldatasheet.com/datasheet-pdf/view/70737/LINER/LTC1487.html
ciao a tutti Ivo
Il primo PIC "master" invia dei byte, il secondo "slave" una volta interrogato, risponde con i dati che ha rilevato.
Ora vorrei provare a realizzare questa connessione,
Prova connessione RS-233:
Codice del PIC18F46K22 "master"
- Codice: Seleziona tutto
#define LED1 LATBbits.LATB7
#define LED2 LATBbits.LATB6
#define PULSANTE1 PORTDbits.RD2
void ConfigureOscillator(void);
void ConfigurePort(void);
void ConfigureUSART(void);
void ConfigureInterrupts(void);
char unsigned contatore;
char unsigned pulsante;
char unsigned ch_usart_in[8];
char unsigned ch_usart_num;
void ConfigureOscillator(void)
{
OSCCON = 0b01110000; // bit7: device enters SLEEP on sleep instruction[0]
// bit6-4: HFINTOSC 16MHz [111]
// bit3: status bit [0]
// bit2: status bit [0]
// bit1-0: clock defined by CONFIG bits [00]
OSCTUNE = 0b11000000; // bit7: device clock derived from the MFINTOSC or HFINTOSC source
// bit6: PLL enabled [1]
// bit5-0: oscillator tuning [000000]
Delay10KTCYx(10);
}
void ConfigurePort(void)
{
ADCON0bits.ADON = 0; //disattivo analogico
LATB = 0x00; //Porte B
TRISBbits.TRISB7 = 0; //LED1
TRISBbits.TRISB6 = 0; //LED2
TRISBbits.TRISB5 = 1; //PULSANTE1
TRISBbits.TRISB4 = 1; //
TRISBbits.TRISB3 = 1; //
TRISBbits.TRISB2 = 1; //
TRISBbits.TRISB1 = 1; //
TRISBbits.TRISB0 = 1; //
LATC = 0x00; //Porte C
TRISCbits.TRISC7 = 1; //USART
TRISCbits.TRISC6 = 1; //USART
ANSELCbits.ANSC7 = 0; //0 = Digital input buffer enabled
ANSELCbits.ANSC6 = 0; //0 = Digital input buffer enabled
LATD = 0x00; //Porte D
TRISDbits.TRISD7 = 1; //
TRISDbits.TRISD6 = 1; //
TRISDbits.TRISD5 = 1; //
TRISDbits.TRISD4 = 1; //
TRISDbits.TRISD3 = 1; //
TRISDbits.TRISD2 = 1; //PULSANTE1
TRISDbits.TRISD1 = 1; //
TRISDbits.TRISD0 = 1; //
ANSELDbits.ANSD7 = 0; //0 = Digital input buffer enabled
ANSELDbits.ANSD6 = 0; //0 = Digital input buffer enabled
ANSELDbits.ANSD5 = 0; //0 = Digital input buffer enabled
ANSELDbits.ANSD4 = 0; //0 = Digital input buffer enabled
ANSELDbits.ANSD3 = 0; //0 = Digital input buffer enabled
ANSELDbits.ANSD2 = 0; //0 = Digital input buffer enabled
ANSELDbits.ANSD1 = 0; //0 = Digital input buffer enabled
ANSELDbits.ANSD0 = 0; //0 = Digital input buffer enabled
}
void ConfigureUSART(void)
{
BAUDCON1bits.BRG16 = 1;
// 10 417 bps 8 bit + 1 stop
Open1USART( USART_TX_INT_OFF &
USART_RX_INT_OFF & //interrupts su ricezione
USART_ASYNCH_MODE &
USART_EIGHT_BIT &
USART_CONT_RX &
USART_BRGH_HIGH,
1535 );
}
void ConfigureInterrupts(void)
{
RC1IE = 1;
RC1IP = 1;
GIE = 1;
PEIE = 1;
}
void interrupt high_isr(void)
{
if (RC1IF)
{
while (!DataRdy1USART());
ch_usart_in[ch_usart_num] = Read1USART();
ch_usart_num++;
if(ch_usart_in[0] != 0x50 || ch_usart_num > 7) ch_usart_num = 0;
if (ch_usart_in[0] == 0x50 && ch_usart_in[7] == 0x51)
{
ch_usart_in[0] = 0;
ch_usart_in[7] = 0;
LED2 = ~LED2;
}
RC1IF = 0;
}
}
/******************************************************************************/
/* Main Program */
/******************************************************************************/
void main(void)
{
ConfigureOscillator();
ConfigurePort();
int i;
LED1 =1; LED2 =1;
for (i=0;i<2000; i++) __delay_ms(1);
LED1=0; LED2=0;
ConfigureUSART();
ConfigureInterrupts();
while (1)
{
if (PULSANTE1 == 0) pulsante = 0;
if (PULSANTE1 == 1) pulsante = 1;
if (ch_usart_in[5] == 0) LED1 = 0;
if (ch_usart_in[5] == 1) LED1 = 1;
Write1USART(0x46);
while (Busy1USART());
Write1USART(contatore);
while (Busy1USART());
Write1USART(pulsante);
while (Busy1USART());
Write1USART(0x00);
while (Busy1USART());
Write1USART(0x64);
while (Busy1USART());
contatore++;
if (contatore > 15) contatore = 0;
for (i=0;i<1000;i++){
__delay_ms(1);
}
}
}
Codice del PIC18F14K50 "slave"
- Codice: Seleziona tutto
void ConfigureOscillator(void);
void ConfigurePort(void);
void ConfigureUSART(void);
void ConfigureInterrupts(void);
char unsigned pulsante;
char unsigned contatore;
char unsigned aggiorna_dati;
int i;
char unsigned ch_usart_in[5];
char unsigned ch_usart_out[8];
char unsigned ch_usart_num;
void ConfigureOscillator(void)
{
// FA PARTIRE IL PLL
OSCTUNEbits.SPLLEN = 1;
//STABILIZZAZIONE PLL
Delay10KTCYx(10);
}
void ConfigurePort(void)
{
ADCON0bits.ADON = 0; //disattivo analogico
LATB = 0x00; //Porte B
TRISBbits.TRISB7 = 1; //USART TX
TRISBbits.TRISB6 = 1; //
TRISBbits.TRISB5 = 1; //USART RX
TRISBbits.TRISB4 = 1; //
ANSELHbits.ANS11 = 0; //0 = Digital input buffer enabled
ANSELHbits.ANS10 = 0; //0 = Digital input buffer enabled
LATC = 0x00; //Porte C
TRISCbits.TRISC7 = 1; //
TRISCbits.TRISC6 = 1; //
TRISCbits.TRISC5 = 1; //
TRISCbits.TRISC4 = 1; //
TRISCbits.TRISC3 = 1; //
TRISCbits.TRISC2 = 0; //LED2
TRISCbits.TRISC1 = 0; //LED1
TRISCbits.TRISC0 = 1; //PULSANTE1
ANSELHbits.ANS9 = 0; //0 = Digital input buffer enabled
ANSELHbits.ANS8 = 0; //0 = Digital input buffer enabled
ANSELbits.ANS7 = 0; //0 = Digital input buffer enabled
ANSELbits.ANS6 = 0; //0 = Digital input buffer enabled
ANSELbits.ANS5 = 0; //0 = Digital input buffer enabled
ANSELbits.ANS4 = 0; //0 = Digital input buffer enabled
}
void ConfigureUSART(void)
{
BAUDCONbits.BRG16 = 1;
// 10417 bps 8 bit + 1 stop
OpenUSART( USART_TX_INT_OFF &
USART_RX_INT_OFF & //interrupts su ricezione
USART_ASYNCH_MODE &
USART_EIGHT_BIT &
USART_CONT_RX &
USART_BRGH_HIGH,
1151 );
}
void ConfigureInterrupts(void)
{
RCIE = 1;
RCIP = 1;
GIE = 1;
PEIE = 1;
}
void interrupt high_isr(void)
{
if (RC1IF)
{
while (!DataRdyUSART());
ch_usart_in[ch_usart_num] = ReadUSART();
ch_usart_num++;
if(ch_usart_in[0] != 0x46 || ch_usart_num > 4) ch_usart_num = 0;
if (ch_usart_in[0] == 0x46 && ch_usart_in[4] == 0x64)
{
LED2 = ~LED2;
ch_usart_in[0] = 0;
ch_usart_in[4] = 0;
WriteUSART(0x50);
while (BusyUSART());
WriteUSART(ch_usart_out[1]);
while (BusyUSART());
WriteUSART(ch_usart_out[2]);
while (BusyUSART());
WriteUSART(ch_usart_out[3]);
while (BusyUSART());
WriteUSART(ch_usart_out[4]);
while (BusyUSART());
WriteUSART(pulsante);
while (BusyUSART());
WriteUSART(ch_usart_out[6]);
while (BusyUSART());
WriteUSART(0x51);
while (BusyUSART());
aggiorna_dati = 1;
}
RC1IF = 0;
}
}
/******************************************************************************/
/* Main Program */
/******************************************************************************/
void main(void)
{
ConfigureOscillator();
ConfigurePort();
LED1=1; LED2=1;
for (i=0;i<2000; i++) __delay_ms(1);
LED1=0; LED2=0;
ch_usart_num = 0;
ConfigureUSART();
ConfigureInterrupts();
while(1)
{
//controllo se accendero o spegenre led 1
if (ch_usart_in[2] == 0) LED1 = 0;
if (ch_usart_in[2] == 1) LED1 = 1;
//controllo lo stato del pulsante 1
if (PULSANTE1 == 0) pulsante = 0;
if (PULSANTE1 == 1) pulsante = 1;
if (aggiorna_dati == 1)
{
// reset del falg
aggiorna_dati = 0;
}
}
}
....e questo funziona ora dovrei provare a realizzare la connesione RS-485 collegando i ltc1487 ai miei PIC, ma ho qualche dubbio,
io ho provato qualcosa del genere ma non ho ben capito a cosa vadano collegati RE e DE.
Qui c'è il datasheet http://pdf1.alldatasheet.com/datasheet-pdf/view/70737/LINER/LTC1487.html
ciao a tutti Ivo

 scusate x il titolo.
scusate x il titolo.