Controllo open-loop vs closed-loop
Un saluto a tutti.
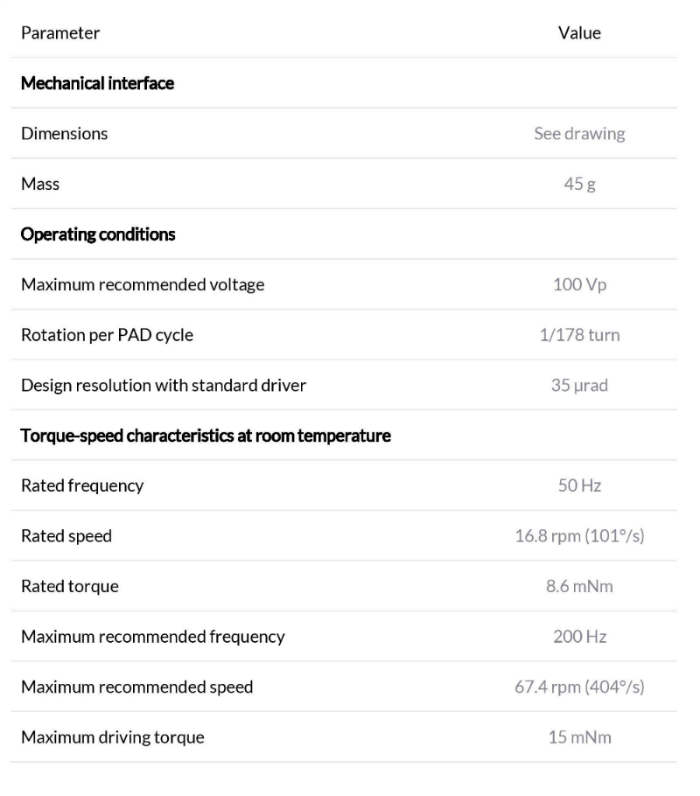
Vorrei fare qualche esperimento per pilotare un motorino piezo (PAD7344 http://www.noliac.com/products/motors/pad7344/) con la massima precisione e accuratezza possibile, ma sono a digiuno di soluzioni pratiche.
Leggevo che esistono fondamentalmente due approcci possibili: open-loop o closed-loop, con vantaggi nettamente a favore del secondo costi a parte.
Avete sotto mano due schemi applicativi per capire il principio di funzionamento che sta alla base delle due soluzioni?
Quando avrò capito vorrei utilizzare un controller basato su Arduino, anche se il produttore suggerisce di utilizzare un suo prodotto specifico,
Grazie
Vorrei fare qualche esperimento per pilotare un motorino piezo (PAD7344 http://www.noliac.com/products/motors/pad7344/) con la massima precisione e accuratezza possibile, ma sono a digiuno di soluzioni pratiche.
Leggevo che esistono fondamentalmente due approcci possibili: open-loop o closed-loop, con vantaggi nettamente a favore del secondo costi a parte.
Avete sotto mano due schemi applicativi per capire il principio di funzionamento che sta alla base delle due soluzioni?
Quando avrò capito vorrei utilizzare un controller basato su Arduino, anche se il produttore suggerisce di utilizzare un suo prodotto specifico,
Grazie