Cancellazione di zeri instabili nella sintesi diretta e dead
Se si cancellano gli zeri nella sintesi diretta e con il metodo dead-beat, gli si compromettere la stabilità del sistema. Come si dimostra?
La comunità del mondo elettrico: elettronica, elettrotecnica, impianti, pic, plc, automazione
https://www.electroyou.it/forum/
jmonty ha scritto:Ho una Gp(s)=(s-2)/(s^2-s).
 = \frac{s - 2}{s^{2} - s} = \frac{s - 2}{s(s-1)}")
") che rappresenta la funzione di trasferimento del processo nel dominio temporale continuo.
che rappresenta la funzione di trasferimento del processo nel dominio temporale continuo.jmonty ha scritto:Ho fatto una sintesi deadbeat con risposta alla rampa ed ho simulato con matlab
jmonty ha scritto:La variabile di attuazione presenta del ringing, ma non si assesta come un gradino in 4 periodi di campionamento con T=0.1.Ho scelto la Gm(z)=a1Z^-1+a2z^-2+a3z^-3+a4z^-4.Pechè???E' dovuto alla Gp(s)?
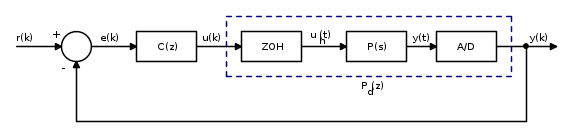
") utilizzando lo schema FidoCadJ che ti ho preparato e scrivendo le equazioni in LaTex.
utilizzando lo schema FidoCadJ che ti ho preparato e scrivendo le equazioni in LaTex./s(s-1)")
*z^-1)/((1-z^-1)(1-a*z^-1))")

^2") rampa di ingresso.
rampa di ingresso.^2*(1-a*z^-1)(1+nz^-1)")
*z^-1*(a1+m1*z^-1+m2*z^-2)")
=V(z)*Gm(z)/Gp(z)")
![[-379.2606z^2 720.3625z^1 -345.5949]/[ 0.0948z^2 36.1535z^1 -36.2483]](/forum/latexrender/pictures/3f41bf022cbb1cbc3b73f9e63d779984.png "[-379.2606z^2 720.3625z^1 -345.5949]/[ 0.0948z^2 36.1535z^1 -36.2483]")