Ciao
 gabri87
gabri87, di seguito una breve descrizione tra i due tipi di controllo trapezioidale e sinusoidale.
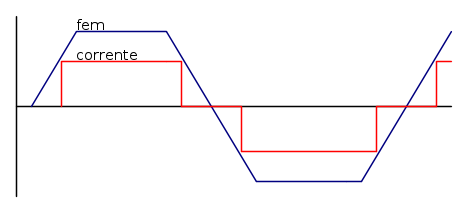
Il controllo trapezoidale è storicamente il primo sviluppato ed è ancora largamente usato per la sua semplicità specie per applicazioni dove poco importa se la coppia sviluppata é affetta da ondulazioni. Viene utilizzato in pratica solo per i brushless trapezoidali, la cui struttura elettromagnetica è tale da generare a regime f.c.e.m. di forma idealmente trapezoidale con parte piatta dell'onda pari a 120° o 60° elettrici (a seconda che si tratti di f.e.m. di fase o concatenate).
Tale controllo è si caratterizza per il fatto che l'inverter alimenta quindi solo due fasi per volta del motore con correnti aventi a regime andamenti idealmente rettangolari (di ampiezza regolabile ed estensione pari a 120° elettrici) con valore nullo negli intervalli in cui la corrispondente f.c.e.m. di fase é variabile.
La corrente di ciascuna fase assume quindi i seguenti stati successivi: positiva per un terzo del periodo, nulla per un sesto, negativa per un terzo e nulla per un sesto. La corrente viene controllata attraverso due dei tre terminali con il terzo elettricamente disconnesso dall'alimentazione.
Un inconveniente degli azionamenti brushless con tecnica di controllo trapezoidale è costituito dalla presenza di ondulazioni di coppia all'asse, specialmente alle basse velocità.
Utilizzando microprocessori più potenti si è sviluppata un'altra tecnica di controllo (sinusoidale) più complessa e costosa di quella trapezoidale ma che comporta minore ondulazione di coppia e quindi una rotazione molto dolce alle basse velocità, migliore rendimento e maggiore risoluzione nei controlli di posizione.
Nella tecnica sinusoidale l'inverter, generalmente di tipo PWM sinusoidale a tensione impressa, alimenta contemporaneamente tutte e tre le fasi del motore imponendo a regime, con l'ausilio di tre anelli di corrente, una terna equilibrata di correnti, ad andamento sinusoidale, le cui fasi sono rigidamente vincolate alla posizione del rotore e pertanto il vettore rappresentativo del relativo campo magnetico rotante statorico risulta di ampiezza costante e sempre in quadratura rispetto a quello rotorico.
L'inverter quindi, oltre a regolare l'ampiezza e la frequenza delle correnti come nella tecnica di controllo trapezoidale ha il compito aggiuntivo di realizzare forme d'onda sinusoidali.
L'azionamento richiede quindi due sensori di corrente (la corrente nella terza fase è uguale all'inverso della loro somma) e un sensore di posizione ad alta risoluzione (resolver o encoder assoluto), in quanto per effettuare con continuità la funzione di autosincronizzazione è necessaria una accurata misura della posizione.