Motore CC con Controllore PID Simulink
Questa è la simulazione di un motore cc (in continua) controllato con PID effettuata
dal mio professore con SIMULINK.
Purtroppo non ho la possibilità di discuterne direttamente con lui , quindi vorrei se possibile
qualche delucidazione per comprendere questo schema , grazie.
( Ho allegato il file .mdl )
lo schema è :

Di seguito riporto i dati utilizzati :
COMANDO AUTOMATICO : steptime = 0 , Initial value = 0 , Final value = 1000 , Sample time = 0
PID : Proportional = 3 , Integral = 4 , Derivative = 0.1 , Derivative divisor (N) = 100
SATURAZIONE : Upper limit = 400 , Lower limit = -400
Coppia di Carico : steptime = 10 , Initial value = 0 , Final value = 100 , Sample time = 0
MOTORE CC : A=[-56 -104 ; 0.812 -0,1] ; B=[40 0;0 -0.312] ; C=[1 0; 0 1] D=[0 0;0 0] ;
Initial conditions = [0 0]'
i risultati di output sono :
Con interruttore chiuso sul PID :

Con interruttore aperto sul PID :

I valori di output dovrebbero essere : v=tensione , I = corrente , n= velocita angolare
Le mie domande sono :
-il gain di 30/pi in uscita al demultiplexer ( uscita n ) a cosa dovrebbe servire ?
ho notato che senza di questo il valore della tensione rimane costante
- il sistema da quello che ho capito dovrebbe essere : ( corregetemi se sbaglio )
comando automatico = ingresso di riferimento
pid = controllore
Motore CC = Sistema controllato(motore in continua)
il blocco Multiplexer , coppia di carico = ??? ( a cosa servono ?)
il gain 30/pi = disturbo ???
dal mio professore con SIMULINK.
Purtroppo non ho la possibilità di discuterne direttamente con lui , quindi vorrei se possibile
qualche delucidazione per comprendere questo schema , grazie.
( Ho allegato il file .mdl )
lo schema è :
Di seguito riporto i dati utilizzati :
COMANDO AUTOMATICO : steptime = 0 , Initial value = 0 , Final value = 1000 , Sample time = 0
PID : Proportional = 3 , Integral = 4 , Derivative = 0.1 , Derivative divisor (N) = 100
SATURAZIONE : Upper limit = 400 , Lower limit = -400
Coppia di Carico : steptime = 10 , Initial value = 0 , Final value = 100 , Sample time = 0
MOTORE CC : A=[-56 -104 ; 0.812 -0,1] ; B=[40 0;0 -0.312] ; C=[1 0; 0 1] D=[0 0;0 0] ;
Initial conditions = [0 0]'
i risultati di output sono :
Con interruttore chiuso sul PID :
Con interruttore aperto sul PID :
I valori di output dovrebbero essere : v=tensione , I = corrente , n= velocita angolare
Le mie domande sono :
-il gain di 30/pi in uscita al demultiplexer ( uscita n ) a cosa dovrebbe servire ?
ho notato che senza di questo il valore della tensione rimane costante
- il sistema da quello che ho capito dovrebbe essere : ( corregetemi se sbaglio )
comando automatico = ingresso di riferimento
pid = controllore
Motore CC = Sistema controllato(motore in continua)
il blocco Multiplexer , coppia di carico = ??? ( a cosa servono ?)
il gain 30/pi = disturbo ???
 .
.




 relazione tra il Torque e la variazione di velocita angolare
relazione tra il Torque e la variazione di velocita angolare =torque
=torque") con
con  =costante
=costante da Kirchhoff
da Kirchhoff")
}{\mathrm{d} t}")

= I_{L}\cdot {\omega}'")
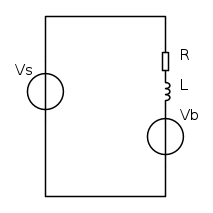
+L\cdot \frac{\mathrm{d} i(t)}{\mathrm{d} t}+K_{B}\cdot \omega")

")
![\frac{\mathrm{d} i(t)}{\mathrm{d} t} = \frac{1}{L}\cdot [V_{s}-R\cdot i(t)-K_{B}\cdot \omega(t)]](/forum/latexrender/pictures/64d954fb043c132a3fbf5e0f47e33703.png "\frac{\mathrm{d} i(t)}{\mathrm{d} t} = \frac{1}{L}\cdot [V_{s}-R\cdot i(t)-K_{B}\cdot \omega(t)]")
")
")
 e la corrente
e la corrente ") incluso la tensione che però sembra essere presa dall'ingresso
incluso la tensione che però sembra essere presa dall'ingresso  che simula il carico esterno.
che simula il carico esterno.
 = forza controelettromotrice )
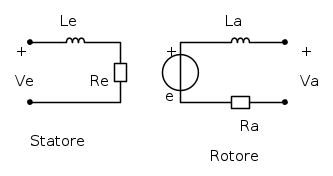
= forza controelettromotrice )=L_{e}\frac{\mathrm{d} i_{e}}{\mathrm{d} t}+R_{e}\cdot i_{e}")
}{V_{e}(s)}=\frac{K_{e}}{1+s\cdot \tau _{e}}")
 = guadagno di statore
= guadagno di statore = costante di tempo di statore
= costante di tempo di statore=L_{a}\frac{\mathrm{d} i_{a}}{\mathrm{d} t}+R_{a}\cdot i_{a}+e")
}{V_{a}(s)-e(s)}=\frac{K_{a}}{1+s\cdot \tau_{a}}")
 = guadagno di rotore
= guadagno di rotore = costante di tempo di rotore
= costante di tempo di rotore :
:

 e all'attrito viscoso
e all'attrito viscoso  :
:
}{T_{M}(s)-T_{L}(s)}=\frac{K_{m}}{\tau_{m}\cdot
s+1}")
 = coppia di carico esercitata sull'albero del motore
= coppia di carico esercitata sull'albero del motore = Guadagno Meccanico
= Guadagno Meccanico = Costante di tempo meccanica
= Costante di tempo meccanica


 Flusso magnetico dello statore , supposto costante
Flusso magnetico dello statore , supposto costante Coefficiente di attrito viscoso
Coefficiente di attrito viscoso Inerzia apparato mobile del motore
Inerzia apparato mobile del motore Tensione alimentazione del rotore
Tensione alimentazione del rotore Corrente rotore
Corrente rotore 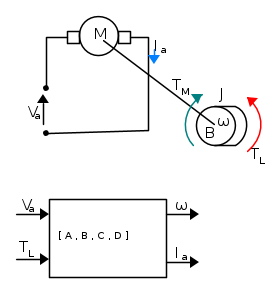
 , in uscita dal motore abbiamo bisogno di un demultiplexer per ottenere i due risultati , che altro non sono che le uscite di
, in uscita dal motore abbiamo bisogno di un demultiplexer per ottenere i due risultati , che altro non sono che le uscite di  e velocita angolare di rotazione del rotore
e velocita angolare di rotazione del rotore