Disaccoppiamento in frequenza
Ciao a tutti
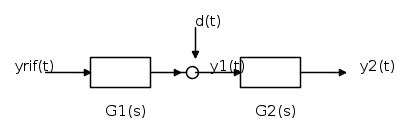
Se ho un sistema di controllo come in figura

La variabile controllata è l'uscita da G2
in cui è presente un disturbo sinusoidale del tipo d(t) = sin (wt) (w compreso [10^-2; 2*10^2]) agente tra G1 e G2. Dal momento che G2 presenta una dinamica molto sfavorevole rispetto a G1 per via della presenza dello zero a destra, dovrei procedere progettando un sistema di controllo disaccoppiato in frequenza.
Il mio obiettivo è quello di progettare un regolatore che soddisfi i seguenti requisiti:
- l'effetto del disturbo d(t) sulla variabile controllata sia trascurabile
- errore a transitorio esaurito nullo per segnali di riferimento costanti
- margine di fase > 75°
Se non vado errato, il progetto di R1 dovrebbe essere semplice in quanto la mia G(s) ha una dinamica favorevole, mi basta settare un guadagno sufficientemente elevato da garantire una buona attenuazione
Come posso progettare R2 (ovvero quello riferito a G2) ??
Devo utilizzare un compensatore? Aggiungo un altro polo?
GRAZIE
Se ho un sistema di controllo come in figura
La variabile controllata è l'uscita da G2
in cui è presente un disturbo sinusoidale del tipo d(t) = sin (wt) (w compreso [10^-2; 2*10^2]) agente tra G1 e G2. Dal momento che G2 presenta una dinamica molto sfavorevole rispetto a G1 per via della presenza dello zero a destra, dovrei procedere progettando un sistema di controllo disaccoppiato in frequenza.
Il mio obiettivo è quello di progettare un regolatore che soddisfi i seguenti requisiti:
- l'effetto del disturbo d(t) sulla variabile controllata sia trascurabile
- errore a transitorio esaurito nullo per segnali di riferimento costanti
- margine di fase > 75°
Se non vado errato, il progetto di R1 dovrebbe essere semplice in quanto la mia G(s) ha una dinamica favorevole, mi basta settare un guadagno sufficientemente elevato da garantire una buona attenuazione
Come posso progettare R2 (ovvero quello riferito a G2) ??
Devo utilizzare un compensatore? Aggiungo un altro polo?
GRAZIE
= G_{1}(s)\cdot G_{2}(s)")
=\frac{10}{(1+10^{-1}s)}")
=\frac{10(1-s)}{(1+10^{-4}s)}")
") è la variabile controllata mentre
è la variabile controllata mentre ") che entra nel nodo sommatore è un disturbo di tipo sinusoidale:
che entra nel nodo sommatore è un disturbo di tipo sinusoidale: =sin(\omega t)") con
con ![\omega \in [10^{-2};2\cdot 10^{2}] rad/s](/forum/latexrender/pictures/9d3a4961e003b475a0544e4aadc535c4.png "\omega \in [10^{-2};2\cdot 10^{2}] rad/s")