Confermo che è possibile modellare tutti gli anelli di controllo, compreso quello di corrente.
Se questo ti serva o meno, dipende dai casi. In particolare, se l'anello di corrente è tarato correttamente, puoi considerare il suo effetto (cioè la funzione di trasferimento tra riferimento di coppia e coppia effettiva) come un passa-basso. Se poi le prestazioni dinamiche che ti occorrono non sono molto spinte, potresti anche trascurare la limitazione di banda introdotta dall'anello di corrente.
Secondo me sarebbe meglio se chiarissi esattamente qual è l'hardware che devi considerare, anche perché, se vuoi andare nei dettagli (cosa che ha senso se vuoi spremere il massimo in termini di dinamica) bisogna tener conto dei ritardi dovuti sia al controllo digitale che all'attuazione, che quasi sempre è PWM.
EcoTan ha scritto:Non intervengo per rispondere alla tua domanda ma devo un po' sbottare.
Il sottoscritto ha realizzato dei robottini, non cartesiani ma soltanto giocattolini, in cui i motori BLDC vengono azionati direttamente dal programma in modalità passo-passo. Il motore BLDC sembra fatto apposta per questo, è macchinoso comandarlo prima come se dovesse spingere sù un drone e poi controllarne la posizione.
Vorrei sbottare anch'io, ma provo a contenermi

Per prima cosa, credo che stiate parlando di applicazioni e di motori/controlli totalmente diversi.
Senza nulla togliere al robottino (che, per inciso, mi piace), il controllo di un robot cartesiano potrebbe richiedere precisioni e dinamiche molto superiori. Con "precisione" intendo anche ridotte oscillazioni durante il movimento (cioè un movimento "liscio").
Purtroppo c'è molta confusione sul termine "brushless", specie associato a "DC". I motori "brushless DC" sono pensati per applicazioni in controllo di velocità (o addirittura "senza controllo"), non a velocità bassa o da fermo.
In realtà, la confusione nasce principalmente dal fatto che il controllo "brushless DC" (che prevede di commutare la corrente o la tensione tra le fasi ad onda quadra) dovrebbe essere applicato, a rigore, a motori con tensione indotta (back-EMF) trapezoidale. In realtà funziona, con un ripple di coppia relativamente alto, anche per motori con back-EMF sinusoidale.
Quindi, molti motori chiamati "brushless DC" in realtà sono dei motori sincroni a magneti permanenti superficiali (Surface Mount - Permanent Magnet Synchronous Motor) sinusoidali, proprio come i motori chiamati "brushless AC" o semplicemente "brushless" ed usati in automazione e robotica. Ci possono essere, ovviamente, variazioni costruttive, come ad esempio l'avvolgimento sul dente (comune nei "brushless DC") invece che distribuito, e quindi anche prestazioni diverse in termini di ripple di coppia o altro, ma il principio di funzionamento e le modalità di controllo applicabili sono le stesse.
I motori "brushless" (AC) utilizzati per controllo di posizione sono per la stragrande maggioranza trifase e vengono controllati con correnti sinusoidali, utilizzando l'informazione sulla posizione proveniente da un sensore (Field Oriented Control, FOC). In sostanza, lavorando in un sistema di coordinate trasformato (due assi ortogonali, di cui uno, l'asse diretto o "d", allineato con l'asse magnetico del rotore), si ottiene una caratteristica molto interessante: la coppia prodotta dipende dalla corrente dell'asse in quadratura, "q". Quindi controllare la corrente equivale a controllare la coppia.
Questo tipo di controllo costituisce l'anello più interno del controllo (in pratica l'anello di corrente e quindi di coppia). E' grazie a questo tipo di controllo che, su motori ben progettati ed insieme ad anelli esterni (posizione, velocità) ben costruiti e tarati, si ottengono le straordinarie prestazioni dinamiche e di precisione dei robot e di altri macchinari industriali.
A mio parere, controllare un motore "brushless", "DC" o "AC" (abbiamo detto che si tratta in realtà di macchine molto simili) in anello aperto, a passo, come fosse uno stepper, non è una scelta ottimale, specie per un controllo di posizione. Prima di tutto perché le prestazioni non sono granché, in pratica occorre sovradimensionare il motore. Poi perché converrebbe usare un motore molto simile come principio di funzionamento, ma progettato per quell'uso, cioè proprio lo stepper.

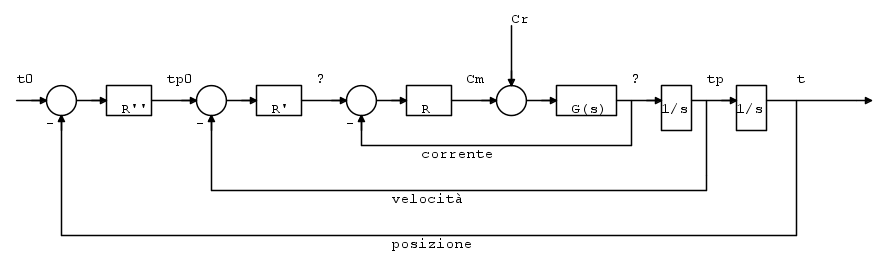
 che è la posizione desiderata, in uscita da tutto ho
che è la posizione desiderata, in uscita da tutto ho  che è la posizione finale. Dopo il blocco PID
che è la posizione finale. Dopo il blocco PID  ho come uscita la velocità
ho come uscita la velocità  , ma in uscita dal secondo blocco PID di controllo
, ma in uscita dal secondo blocco PID di controllo  ottengo il valore della coppia
ottengo il valore della coppia  giusto? Invece dopo il regolatore R ho la coppia reale
giusto? Invece dopo il regolatore R ho la coppia reale  a cui viene sottratta quella resistiva. Così come è disegnato lo schema può andare bene?
a cui viene sottratta quella resistiva. Così come è disegnato lo schema può andare bene?