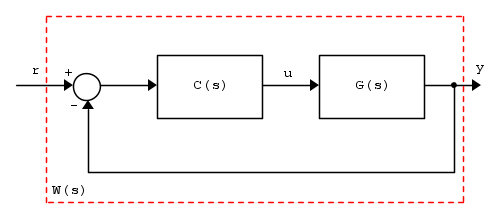
Quando si definisce una funzione di trasferimento bisogna sempre indicare l'ingresso e l'uscita del sistema per capire quali siano le variabili in gioco.
Detto questo, e supponendo che il tuo sistema abbia un
reference in velocità è palese che risulti instabile per via dell'integratore.
A questo punto è obbligatorio retroazionarlo per renderlo stabile.
La risposta ideale sarebbe quella che insegue perfettamente il riferimento in ingresso senza ritardo per cui :
 = \frac{Y(s)}{R(s)} = 1")
Questa f.d.t. non è realizzabile perché richiederebbe un controllore anticausale e quindi non realizzabile.
Per rendersene conto basta fare un semplice tentativo
in catena aperta tentando di invertire la funzione di trasferimento originaria ( tentativo bizzarro di sintesi diretta ).
 =G(s)\cdot G^{-1}(s) = G(s) \cdot C(s) = 1")
implica
 = \frac{s(s+10)^2}{10^4}")
Che è chiaramente irrealizzabile.
Non rimane che ottenere la miglior approssimazione di
 = 1")
che non dia origine a regolatori
")
irrealizzabili.
Questo si può ottenere in vari modi. Quello più classico consiste nell'ipotizzare una struttura di
e cercare i parametri che soddisfano le specifiche.
La ricerca della soluzione si traduce quasi sempre nella soluzione di un problema di ottimizzazione vincolata non lineare.
Personalmente preferisco procedere in modo diverso.
In un caso come quello indicato procederei con la parametrizzazione di
Youla-Kucera caratterizzando tutti i compensatori stabili e in questo anello di funzioni razionali proprie e stabili andrei a cercare quella ottima.
Il fatto di imporre la
stabilità forte del controllore ha indubbi vantaggi in quanto limita la ricerca nell'area di interesse.
Infatti non è buona regola stabilizzare un sistema instabile con un controllore instabile anche se da un punto di vista teorico la soluzione potrebbe esistere.
 = \frac{10^4}{s(s+10)^2}")
 = \frac{100}{s(1+\frac{1}{10})^2}")
G(s)} = K_v = \frac{100}{e_v_-_p_e_c_e_n_t_u_a_l_e}")

 %
%
 %
%

 = \frac{1+\frac{s}{\alpha*\omega_1}}{1+\frac{s}{\omega_1}}")
 = \frac{1+\frac{s}{\alpha*\omega_1}}{1+\frac{s}{\omega_1 }}")
!["[#]"](./images/smilies/angry (1).gif "arrabbiato")