Controllo servomotore e cablaggio deviatore
Salve a tutti,
premetto che, oltre ad essere nuovo nel forum, sono anche alle prime armi in elettronica per lo più da hobbista. Avrei bisogno di alcuni chiarimenti, se è possibile.
Dovrei controllare un servo motore DC Hitec HS-311 opportunamente modificato per la rotazione a 360°. Ho eliminato il circuito interno lasciando solo i due cavi (+ e -) collegati al motore ed ho eliminato il pezzo di plastica su un ingranaggio che ne impediva la completa rotazione (ho visto alcuni tutorial).
Per quanto riguarda il controllo:
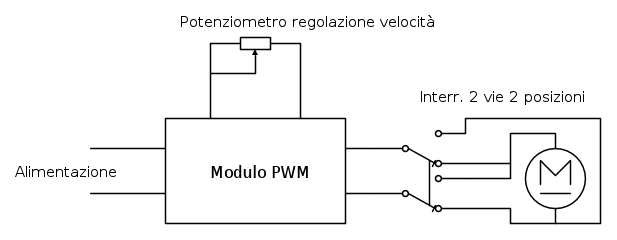
per invertire la polarità (e quindi il senso di rotazione) sto usando un deviatore a bilanciere a 3 posizioni (on-off-on) con ritorno automatico su off centrale, mentre, per modificare la velocità di rotazione vorrei utilizzare un secondo commutatore rotativo a 3 vie e 4 posizioni a cui aggiungere su ogni posizione dei diodi o resistenze in serie. I miei dubbi riguardano proprio quest'ultimo, ecco lo schema:
Ora, considerando che il servo lavora dai 4.8v 700 mA ai 6v 800 mA, che dovrò quindi alimentarlo con 4xAA o con alimentatore da 6v 1A e che ho bisogno di una caduta di tensione via via maggiore su ognuno dei 4 poli del commutatore per ottenere una variazione della velocità di rotazione, le domande sono queste:
- come la ottengo? Usando dei diodi in serie oppure resistenze?
- nel caso di diodi, in quale verso vanno inseriti e come cablare il commutatore (visto che con tutti quei poli non ci ho capito più niente e che i cavi che provengono dal motore sono due)?
- volendo tagliare la testa al toro, potrei utilizzare un potenziometro anziché il commutatore? Se si, di quale valore?
Spero di essermi spiegato bene, in caso contrario mi scuso in anticipo.
Grazie mille, saluti
premetto che, oltre ad essere nuovo nel forum, sono anche alle prime armi in elettronica per lo più da hobbista. Avrei bisogno di alcuni chiarimenti, se è possibile.
Dovrei controllare un servo motore DC Hitec HS-311 opportunamente modificato per la rotazione a 360°. Ho eliminato il circuito interno lasciando solo i due cavi (+ e -) collegati al motore ed ho eliminato il pezzo di plastica su un ingranaggio che ne impediva la completa rotazione (ho visto alcuni tutorial).
Per quanto riguarda il controllo:
per invertire la polarità (e quindi il senso di rotazione) sto usando un deviatore a bilanciere a 3 posizioni (on-off-on) con ritorno automatico su off centrale, mentre, per modificare la velocità di rotazione vorrei utilizzare un secondo commutatore rotativo a 3 vie e 4 posizioni a cui aggiungere su ogni posizione dei diodi o resistenze in serie. I miei dubbi riguardano proprio quest'ultimo, ecco lo schema:
Ora, considerando che il servo lavora dai 4.8v 700 mA ai 6v 800 mA, che dovrò quindi alimentarlo con 4xAA o con alimentatore da 6v 1A e che ho bisogno di una caduta di tensione via via maggiore su ognuno dei 4 poli del commutatore per ottenere una variazione della velocità di rotazione, le domande sono queste:
- come la ottengo? Usando dei diodi in serie oppure resistenze?
- nel caso di diodi, in quale verso vanno inseriti e come cablare il commutatore (visto che con tutti quei poli non ci ho capito più niente e che i cavi che provengono dal motore sono due)?
- volendo tagliare la testa al toro, potrei utilizzare un potenziometro anziché il commutatore? Se si, di quale valore?
Spero di essermi spiegato bene, in caso contrario mi scuso in anticipo.
Grazie mille, saluti