Filtro di Kalman Per stimare il Vento
Ciao a tutti...sono di nuovo qui con un nuovo problema.
Per ora si e' deciso di partire a stimare il vento con un bel filtro di Kalman. La cosa e' fattibile e vi espongo un po' come vorrei fare.
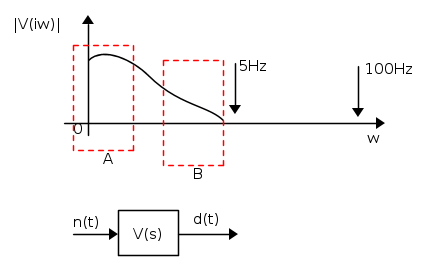
Nel programma SIMULINK in questione (che fa volare il quadricottero) gia' c'e' un filtro di Kalman che prende in ingresso le misure del sensore di posizione del quadri (una cosa simile a un GPS per Indoor) e fa una predizione di dove si trovera' il quadricottero.
Il problema e' che il filtro di Kalman in questione non tiene conto per niente di disturbi vari e inoltre e' un filtro di Kalman a guadagni costanti.
La soluzione che mi e' venuta in mente e' quella di aggiungere alle equazioni a cui fa riferimento il filtro il disturbo introdotto dal vento. Per fare cio' in prima approssimazione ho supposto di vedere il vento come una Forza (quindi pensate a un vento che agisce solo nel piano xy).
Di seguito ho scritto le equazioni differenziali che legano lo stato del sistema al disturbo, non so se ho sbagliato qualcosa:
Ora il mio problema e' come modificare il codice del filtro di Kalman. Secondo voi basta aggiungere una variabile di stato, e modificare la relativa equazione?
Scusate se sono un po' vago ma non ho capito bene come fare questa cosa.
Se qualcuno volesse propormi un approccio diverso faccia pure :)
Fab.
Per ora si e' deciso di partire a stimare il vento con un bel filtro di Kalman. La cosa e' fattibile e vi espongo un po' come vorrei fare.
Nel programma SIMULINK in questione (che fa volare il quadricottero) gia' c'e' un filtro di Kalman che prende in ingresso le misure del sensore di posizione del quadri (una cosa simile a un GPS per Indoor) e fa una predizione di dove si trovera' il quadricottero.
Il problema e' che il filtro di Kalman in questione non tiene conto per niente di disturbi vari e inoltre e' un filtro di Kalman a guadagni costanti.
La soluzione che mi e' venuta in mente e' quella di aggiungere alle equazioni a cui fa riferimento il filtro il disturbo introdotto dal vento. Per fare cio' in prima approssimazione ho supposto di vedere il vento come una Forza (quindi pensate a un vento che agisce solo nel piano xy).
Di seguito ho scritto le equazioni differenziali che legano lo stato del sistema al disturbo, non so se ho sbagliato qualcosa:
- foto.JPG (354.96 KiB) Osservato 7376 volte
Ora il mio problema e' come modificare il codice del filtro di Kalman. Secondo voi basta aggiungere una variabile di stato, e modificare la relativa equazione?
Scusate se sono un po' vago ma non ho capito bene come fare questa cosa.
Se qualcuno volesse propormi un approccio diverso faccia pure :)
Fab.
 vuol dire che
vuol dire che  ma siccome il modello e' di tipo stocastico si ha :
ma siccome il modello e' di tipo stocastico si ha :
 e' una variabile aleatoria che indica il fatto importantissimo che c'e' un errore di modello per cui
e' una variabile aleatoria che indica il fatto importantissimo che c'e' un errore di modello per cui 
 .
. dovrei aumentare il valore dell'incertezza ovvero la varianza di
dovrei aumentare il valore dell'incertezza ovvero la varianza di ") come l'uscita di un filtro alimentato con rumore bianco gaussiano
come l'uscita di un filtro alimentato con rumore bianco gaussiano ") .
.
") , la si deve inserire nel modello generale e poi si stima
, la si deve inserire nel modello generale e poi si stima *(Fu/m)-wind;")
*(Fu/m)-wind;")
") ed il processo
ed il processo ") siano generati da rumori bianchi statisticamente indipendenti tra loro.
siano generati da rumori bianchi statisticamente indipendenti tra loro. e
e  .
. uniformemente distribuita nell'intervallo
uniformemente distribuita nell'intervallo ") .
.") e
e ") .
.