Progettare regolatori PI
Salve a tutti! Sono nuovo e finalmente ho trovato un sito dove qualcuno capisce qualcosa di elettronica e derivati e non solo matematica pura.
Ho un problema sulla progettazione di regolatori PI che a lezione abbiamo visto e fatto a occhio e croce 4 esercizi ma mi perdevo sempre nello stesso punto.
Faccio un esempio pratico altrimenti mi perdo.
Data una funzione di trasferimento=\frac{(1-S)}{(1+0.1S)^2}") devo progettare un PI con margine di fase
devo progettare un PI con margine di fase  e banda passante
e banda passante  massima
massima
Mi sono fatto il diagramma di bode di questa funzione e ho visto che in ho un polo con molteplicità
ho un polo con molteplicità  e il diagramma scende con pendenza
e il diagramma scende con pendenza  . Questa pendenza finale so che devo ritrovarmela una volta finito il regolatore.
. Questa pendenza finale so che devo ritrovarmela una volta finito il regolatore.
So anche che posso cancellare poli e zeri "come mi pare" aggiungendoli al regolatore") anche se non ho capito quale criterio devo utilizzare per farlo.
anche se non ho capito quale criterio devo utilizzare per farlo.
Una volta trovata la che mi interessa, la funzione di trasferimento finale sarà data da =\frac{L(S)}{G(S)}")
Fatta questa piccola premessa, noi per il margine di fase dovremmo essere capaci di usare la carta semi logaritmica e un regolino dove abbiamo i gradi. Metto una foto perché non so neanche se abbia un nome suo.
http://i42.tinypic.com/6yfckw.jpg
Qualcuno sa come si usi e mi può spiegare come devo calcolare i poli o gli zeri (più la loro fase trovata con sto regolino) da mettere nel regolatore?
P.s: se non si fosse capito sto preparando controlli automatici xD
Grazie mille!
Ho un problema sulla progettazione di regolatori PI che a lezione abbiamo visto e fatto a occhio e croce 4 esercizi ma mi perdevo sempre nello stesso punto.
Faccio un esempio pratico altrimenti mi perdo.
Data una funzione di trasferimento
devo progettare un PI con margine di fase e banda passante massimaMi sono fatto il diagramma di bode di questa funzione e ho visto che in
ho un polo con molteplicità e il diagramma scende con pendenza . Questa pendenza finale so che devo ritrovarmela una volta finito il regolatore.So anche che posso cancellare poli e zeri "come mi pare" aggiungendoli al regolatore
anche se non ho capito quale criterio devo utilizzare per farlo.Una volta trovata la
che mi interessa, la funzione di trasferimento finale sarà data da Fatta questa piccola premessa, noi per il margine di fase dovremmo essere capaci di usare la carta semi logaritmica e un regolino dove abbiamo i gradi. Metto una foto perché non so neanche se abbia un nome suo.
http://i42.tinypic.com/6yfckw.jpg
Qualcuno sa come si usi e mi può spiegare come devo calcolare i poli o gli zeri (più la loro fase trovata con sto regolino) da mettere nel regolatore?
P.s: se non si fosse capito sto preparando controlli automatici xD
Grazie mille!
") lo
lo  e metterlo dentro i poli e zeri della FdT.
e metterlo dentro i poli e zeri della FdT. di
di  con molteplicità 2, quindi il margine di fase
con molteplicità 2, quindi il margine di fase  .
. ? Quello zero diminuisce la fase.
? Quello zero diminuisce la fase. ? Che mi fa scendere la fase di 90°
? Che mi fa scendere la fase di 90° ma il fatto di avere la banda passante massima, vuol dire che posso traslare la funzione di trasferimento fino ad avere un margine che si avvicini il più possibile a 45° o sbaglio?
ma il fatto di avere la banda passante massima, vuol dire che posso traslare la funzione di trasferimento fino ad avere un margine che si avvicini il più possibile a 45° o sbaglio?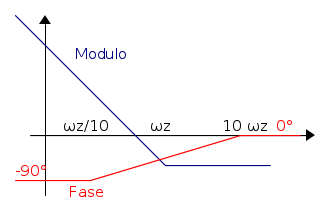
 e ho tracciato modulo e fase asintotici. Nota che la fase e` sempre negativa e quindi riduce comunque il margine di fase.
e ho tracciato modulo e fase asintotici. Nota che la fase e` sempre negativa e quindi riduce comunque il margine di fase. a
a  ) fino a
) fino a  )
) dove
dove![\varphi_c=\arg[G(j\omega_c)]](/forum/latexrender/pictures/156ea01d6cac3bdd4dd9ce870d20617c.png "\varphi_c=\arg[G(j\omega_c)]") . Solo col criterio di bode per i sistemi retroazionati usavamo il calcolo della fase con l'arcotangente.
. Solo col criterio di bode per i sistemi retroazionati usavamo il calcolo della fase con l'arcotangente.{kind=link}