In attesa dell'esito del prossimo volo, può essere interessante scoprire qualcosa sulle tecnolgie scelte e utilizzate per la realizzazione di Ingenuity.
Per questo ho trovato utile la
pubblicazione di J. (Bob) Balaram(Chief Engineer, Mars Helicopter Project - JPL-NASA).
La struttura di Ingenuity è assemblata intorno ad un singolo pezzo tubolare(quindi cavo) all'interno del quale passano tutti i fili che collegano tra loro le componenti elettroniche e meccaniche mentre le schede(Avionics Boards) montate formano i lati del cubo posizionato nella parte inferiore, all'interno del quale trovano alloggio anche le batterie
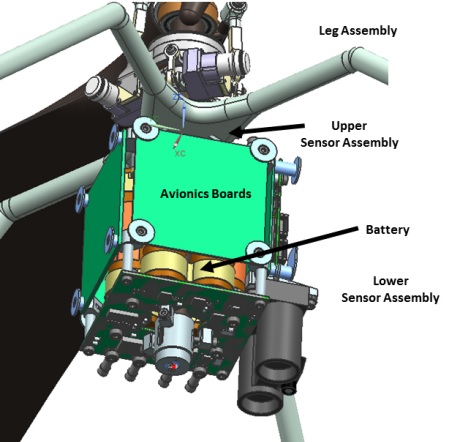
- detailAvionic.jpg (57.19 KiB) Osservato 8269 volte
Per quanto riguarda la meccanica di volo, nella riproduzione successiva si distinguono(etichettate) le componenti del rotore, simile a quello degli elicotteri da trasporto mentre i motori, impiegati per la rotazione e inclinazione delle pale, sono elettrici.
Diversi sono i componenti elettronici ai quali hanno affidato la gestione del velivolo.
Per il processore di riferimento hanno guardato tra l'hardware dei dispositivi mobili e scelto il processore Qualcomm Snapdragon 801, architettura Arm(
il link).
Un Quad-core a 2.26 GHz con 2 GB di RAM, 32 GB Flash memory, UART, SPI e degli I/O(GPIO), area di memoria per gestione immagini e tante altre caratteristiche che la documentazione tecnica può svelare.
Il software(firmware) a bordo dello Snapdragon, sviluppato nell'ambito del sistema operativo Linux
(vedere: Canham, T., F’ Software Framework
https://github.com/nasa/fprime, JPL, 2017), svolge diverse funzioni che comprendono anche l'algoritmo di navigazione visiva, al quale abbiamo accennato in
[ 39 ] per il problema incontrato nel sesto volo.
Lo Snapdragon comunica via seriale con altri due microcontrollori dedicati al controllo del volo(FC) vero e proprio.
Si tratta di due TMS570LC43x(
il TechnicalReferenceManual), processori ad alta affidabilità impiegati in ambio automotive: lavorano at 300 MHz con 512 K RAM, 4 MB flash memory, UART, SPI e GPIO.
Sono stati integrati come MCU ridondanti infatti entrambi acquisiscono gli stessi dati, elaborano nel medesimo modo le informazioni per garantire il controllo di volo ma solo uno di fatto regola i motori, mentre l'altro è pronto ad intervenire in caso di fault: una sorta di back-up caldo.
Interagiscono con la FPGA MicroSemi’s ProASIC3L(
il link) che si fa carico della gestione di tutte le criticità dei sensori, degli attuatori, quindi interpreta gli eventuali errori delle MCU con l'onere di gestire la loro commutazione a caldo(se si nota sono sulla stessa scheda FFB).
A livello di strumentazione è presente una IMU Bosch BMI160(
il link), un sensore di inclinazione Murata SCA100T-D02(
il link) e un altimetro a laser Garmin LIDAR Lite v3(
il link).
La telecamera di navigazione, quella in bianco e nero che acquisisce le immagini per la navigazione, è realizzata con un sensore ad otturatore globale Omnivision OV7251(
il link).
Completa la dotazione il necessario alla comunicazione radio con il rover Perseverance.
La trasmissione si basa su protocolli Zigbee a bassa potenza e utilizza il chipset SiFlex 02 da 914 MHz(
un brochure); ovviamente questo hardware è presente su entrambi(rover e velivolo).
La trasmissione dati avviene a 250 kbit/s, garantita almeno sino alla distanza di 1 km.
L'antenna è unipolare e come si nota dalle immagini è collocata sul pannello solare, pensato anche come piano di terra più grande per comunicare in modo uniforme in tutte le direzioni.
Infatti, sia al suolo che in volo, Ingenuity potrebbe trovarsi orientato in qualsiasi direzione rispetto al punto in cui si trova Perseverance.
Pur trattandosi di componentistica COTS, ovvero disponibile sul mercato commerciale, la selezione è stata fatta cercando caratteristiche tipicamente presenti in produzioni di livello militare, automobilistico o industriale con l'intervallo di temperatura di esercizio garantito almeno tra -40 C e +85 C.
Tutta l'avionica è di fatto distribuita su cinque schede, come qui rappresentato
Intanto, chi vuole approfondire può leggere direttamente la pubblicazione, così da scoprire anche eventuali miei errori e porvi rimedio, altrimenti al prossimo post.
Saluti
W - U.H.F.

 Elettrotecnica e non solo (admin)
Elettrotecnica e non solo (admin) Un gatto tra gli elettroni (IsidoroKZ)
Un gatto tra gli elettroni (IsidoroKZ) Esperienza e simulazioni (g.schgor)
Esperienza e simulazioni (g.schgor) Moleskine di un idraulico (RenzoDF)
Moleskine di un idraulico (RenzoDF) Il Blog di ElectroYou (webmaster)
Il Blog di ElectroYou (webmaster) Idee microcontrollate (TardoFreak)
Idee microcontrollate (TardoFreak) PICcoli grandi PICMicro (Paolino)
PICcoli grandi PICMicro (Paolino) Il blog elettrico di carloc (carloc)
Il blog elettrico di carloc (carloc) DirtEYblooog (dirtydeeds)
DirtEYblooog (dirtydeeds) Di tutto... un po' (jordan20)
Di tutto... un po' (jordan20) AK47 (lillo)
AK47 (lillo) Esperienze elettroniche (marco438)
Esperienze elettroniche (marco438) Telecomunicazioni musicali (clavicordo)
Telecomunicazioni musicali (clavicordo) Automazione ed Elettronica (gustavo)
Automazione ed Elettronica (gustavo) Direttive per la sicurezza (ErnestoCappelletti)
Direttive per la sicurezza (ErnestoCappelletti) EYnfo dall'Alaska (mir)
EYnfo dall'Alaska (mir) Apriamo il quadro! (attilio)
Apriamo il quadro! (attilio) H7-25 (asdf)
H7-25 (asdf) Passione Elettrica (massimob)
Passione Elettrica (massimob) Elettroni a spasso (guidob)
Elettroni a spasso (guidob) Bloguerra (guerra)
Bloguerra (guerra)


