
 Elettrotecnica e non solo (admin)
Elettrotecnica e non solo (admin) Un gatto tra gli elettroni (IsidoroKZ)
Un gatto tra gli elettroni (IsidoroKZ) Esperienza e simulazioni (g.schgor)
Esperienza e simulazioni (g.schgor) Moleskine di un idraulico (RenzoDF)
Moleskine di un idraulico (RenzoDF) Il Blog di ElectroYou (webmaster)
Il Blog di ElectroYou (webmaster) Idee microcontrollate (TardoFreak)
Idee microcontrollate (TardoFreak) PICcoli grandi PICMicro (Paolino)
PICcoli grandi PICMicro (Paolino) Il blog elettrico di carloc (carloc)
Il blog elettrico di carloc (carloc) DirtEYblooog (dirtydeeds)
DirtEYblooog (dirtydeeds) Di tutto... un po' (jordan20)
Di tutto... un po' (jordan20) AK47 (lillo)
AK47 (lillo) Esperienze elettroniche (marco438)
Esperienze elettroniche (marco438) Telecomunicazioni musicali (clavicordo)
Telecomunicazioni musicali (clavicordo) Automazione ed Elettronica (gustavo)
Automazione ed Elettronica (gustavo) Direttive per la sicurezza (ErnestoCappelletti)
Direttive per la sicurezza (ErnestoCappelletti) EYnfo dall'Alaska (mir)
EYnfo dall'Alaska (mir) Apriamo il quadro! (attilio)
Apriamo il quadro! (attilio) H7-25 (asdf)
H7-25 (asdf) Passione Elettrica (massimob)
Passione Elettrica (massimob) Elettroni a spasso (guidob)
Elettroni a spasso (guidob) Bloguerra (guerra)
Bloguerra (guerra)Con un darlington integrato la VceSat è intorno al volt, quindi il motore funziona a 5V...va bene?
comunque, secondo me se l'OP spiega il risultato che vuole ottenere anziché domandarci modifiche su un circuito pre-progettato (e con diverse criticità), magari riusciamo a trovare una soluzione migliore perché invertire quei due rami onestamente fa proprio schifo :)
Deviatore elettronico
Moderatori: ![]() carloc,
carloc, ![]() g.schgor,
g.schgor, ![]() BrunoValente,
BrunoValente, ![]() IsidoroKZ
IsidoroKZ
0
voti
[11] Re: Deviatore elettronico
![]() da
da ![]() obiuan » 24 lug 2015, 10:58
obiuan » 24 lug 2015, 10:58
_______________________________________________________
Gli oscillatori non oscillano mai, gli amplificatori invece sempre
Io HO i poteri della supermucca, e ne vado fiero!
Gli oscillatori non oscillano mai, gli amplificatori invece sempre
Io HO i poteri della supermucca, e ne vado fiero!


0
voti
[12] Re: Deviatore elettronico
![]() da
da ![]() giorgik » 24 lug 2015, 11:20
giorgik » 24 lug 2015, 11:20
Scusate se rispondo solo ora. Prima di tutto grazie dei vostri suggerimenti. Cerco di rispondere a tutti.
1- il TIP107 è un Darlington
2- il motoriduttore che uso utilizza tensioni che vanno da 3V fino a 12V (a 5V assorbe 74mA,
in stallo 670mA)
3- LDR o fotoresistenza: buio -> 80kohm, max luce -> 10kohm
Voglio usare questo tipo di circuito perché desidero avere una variazione di velocità motore dovuta a variazione di luminosità di sorgenti esterne.
I due tipi di circuiti, mi danno 2 tipologie di celle: eccitatore e inibitore.
Quello che chiedo è di poter inserire un sistema elettronico che a seconda dello stato di un altro sensore esterno, mi selezioni la configurazione eccitatore o inibitore. Questa cosa si può fare usando un deviatore meccanico che ho messo in allegato, quindi intervenendo manualmente su di esso. Io invece voglio farlo in automatico in base allo stato di un terzo sensore.
Questi circuiti che vi ho messo funzionano e sono alla base dei robot fotovori, ossia sensibili alla luce (se ne usano per ciascun motore del robot).
Vorrei sapere come poter misurare i parametri del motore che avete citato nel precedente post, la cosa mi interessa moltissimo.
1- il TIP107 è un Darlington
2- il motoriduttore che uso utilizza tensioni che vanno da 3V fino a 12V (a 5V assorbe 74mA,
in stallo 670mA)
3- LDR o fotoresistenza: buio -> 80kohm, max luce -> 10kohm
Voglio usare questo tipo di circuito perché desidero avere una variazione di velocità motore dovuta a variazione di luminosità di sorgenti esterne.
I due tipi di circuiti, mi danno 2 tipologie di celle: eccitatore e inibitore.
Quello che chiedo è di poter inserire un sistema elettronico che a seconda dello stato di un altro sensore esterno, mi selezioni la configurazione eccitatore o inibitore. Questa cosa si può fare usando un deviatore meccanico che ho messo in allegato, quindi intervenendo manualmente su di esso. Io invece voglio farlo in automatico in base allo stato di un terzo sensore.
Questi circuiti che vi ho messo funzionano e sono alla base dei robot fotovori, ossia sensibili alla luce (se ne usano per ciascun motore del robot).
Vorrei sapere come poter misurare i parametri del motore che avete citato nel precedente post, la cosa mi interessa moltissimo.


0
voti
[13] Re: Deviatore elettronico
![]() da
da ![]() obiuan » 24 lug 2015, 11:49
obiuan » 24 lug 2015, 11:49
Oh bene, ora è molto più chiaro.
Soprattutto, mi sembra chiaro che i circuiti che hai disegnato non hanno criticità...non funzionano proprio. Sicuro di non aver invertito C ed E quando li hai disegnati?
In pratica, quello che ti serve è un circuito che si comporti così:
- Input selettore a 1 logico:
- fotoresistenza 80k (buio) ==> motore spento, quindi uscita a meno di 3V
- fotoresistenza 10k (luce) ==> motore a massima velocità, quindi uscita idealmente a 6V
- valori intermedi di luce: variazione lineare dell'uscita da (meno di) 3V a (idealmente) 6V all'aumentare della luce
- Input selettore a 0 logico:
- fotoresistenza 80k (buio) ==> motore a massima velocità, quindi uscita idealmente a 6V
- fotoresistenza 10k (luce) ==> motore spento, quindi uscita a meno di 3V
- valori intermedi di luce: variazione lineare dell'uscita da (idealmente) 6V a (meno di) 3V al decrescere della luce
ho capito bene?
Soprattutto, mi sembra chiaro che i circuiti che hai disegnato non hanno criticità...non funzionano proprio. Sicuro di non aver invertito C ed E quando li hai disegnati?
In pratica, quello che ti serve è un circuito che si comporti così:
- Input selettore a 1 logico:
- fotoresistenza 80k (buio) ==> motore spento, quindi uscita a meno di 3V
- fotoresistenza 10k (luce) ==> motore a massima velocità, quindi uscita idealmente a 6V
- valori intermedi di luce: variazione lineare dell'uscita da (meno di) 3V a (idealmente) 6V all'aumentare della luce
- Input selettore a 0 logico:
- fotoresistenza 80k (buio) ==> motore a massima velocità, quindi uscita idealmente a 6V
- fotoresistenza 10k (luce) ==> motore spento, quindi uscita a meno di 3V
- valori intermedi di luce: variazione lineare dell'uscita da (idealmente) 6V a (meno di) 3V al decrescere della luce
ho capito bene?
_______________________________________________________
Gli oscillatori non oscillano mai, gli amplificatori invece sempre
Io HO i poteri della supermucca, e ne vado fiero!
Gli oscillatori non oscillano mai, gli amplificatori invece sempre
Io HO i poteri della supermucca, e ne vado fiero!
3
voti
[14] Re: Deviatore elettronico
![]() da
da ![]() Orionis » 24 lug 2015, 14:49
Orionis » 24 lug 2015, 14:49
Un po' alla volta si incomincia a vedere la luce, anche grazie a  obiuan che ha sintetizzato le specifiche.
obiuan che ha sintetizzato le specifiche.
Personalmente, non sapendo pero' quali sono le tue competenze di programmazione, metterei in campo una bella CPU, semplice semplice, che facilita perlomeno la comprensione del funzionamento e ti permette di adattare il circuito a diverse condizioni.
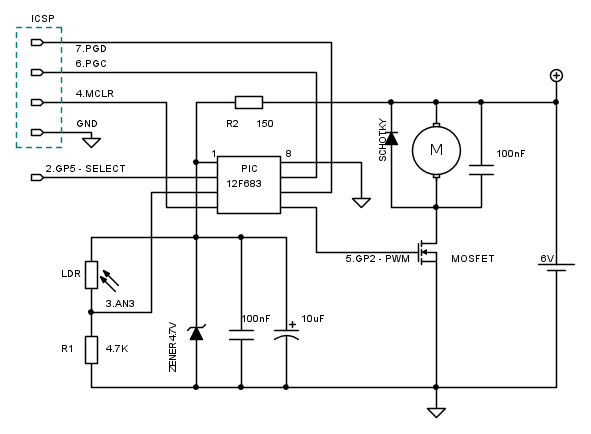
Lo schema potrebbe essere questo:
Funzionamento:
- l'ingresso SELECT seleziona il modo di funzionamento (inibitore/eccitatore), coi livelli che vuoi
- l'ingresso AN3 legge la tensione dal partitore con la LDR; per R1 ho messo un valore indicativo (non ho voglia di fare calcoli con questo caldo). Comunque, il rapporto di resistenza luce/buio (8:1) che hai comunicato mi sembra piuttosto ristretto; sei sicuro dei valori ?
- l'uscita GP2 (PWM) comanda il mosfet con duty cycle variabile per ottenere qualsiasi (o quasi) velocita' (N.B. per il mosfet non ho cercato il modello per quanto sopra).
- il tutto é alimentato prelevando i 6V della batteria e riducendoli circa a 4.7V con un zener e la resistenza R2; non serve una grande precisione ne stabilita'. Basta leggere piu' volte il valore del partitore e mediare i risultati. Hai un tempo 'infinito' per fare questo.
- per il clock si usa l'oscillatore interno a 8 MHz
- Il connettore ICSP serve per la programmazione del PIC
Tramite SW puoi impostare livello del segnale di comando, sensibilita' alla luce e variazioni di velocita', comprese eventualmente di accelerazioni.
Resta da stabilire se e come gestire lo stallo del motorino; se é probabile che accada occore inserire una resistenza in serie al motore e leggerne la tensione tramite un altro ingresso analogico del PIC (es. AN0).
Ciao
Personalmente, non sapendo pero' quali sono le tue competenze di programmazione, metterei in campo una bella CPU, semplice semplice, che facilita perlomeno la comprensione del funzionamento e ti permette di adattare il circuito a diverse condizioni.
Lo schema potrebbe essere questo:
Funzionamento:
- l'ingresso SELECT seleziona il modo di funzionamento (inibitore/eccitatore), coi livelli che vuoi
- l'ingresso AN3 legge la tensione dal partitore con la LDR; per R1 ho messo un valore indicativo (non ho voglia di fare calcoli con questo caldo). Comunque, il rapporto di resistenza luce/buio (8:1) che hai comunicato mi sembra piuttosto ristretto; sei sicuro dei valori ?
- l'uscita GP2 (PWM) comanda il mosfet con duty cycle variabile per ottenere qualsiasi (o quasi) velocita' (N.B. per il mosfet non ho cercato il modello per quanto sopra).
- il tutto é alimentato prelevando i 6V della batteria e riducendoli circa a 4.7V con un zener e la resistenza R2; non serve una grande precisione ne stabilita'. Basta leggere piu' volte il valore del partitore e mediare i risultati. Hai un tempo 'infinito' per fare questo.
- per il clock si usa l'oscillatore interno a 8 MHz
- Il connettore ICSP serve per la programmazione del PIC
Tramite SW puoi impostare livello del segnale di comando, sensibilita' alla luce e variazioni di velocita', comprese eventualmente di accelerazioni.
Resta da stabilire se e come gestire lo stallo del motorino; se é probabile che accada occore inserire una resistenza in serie al motore e leggerne la tensione tramite un altro ingresso analogico del PIC (es. AN0).
Ciao
Nemmeno gli Dei possono nulla contro la stupidità umana ?

0
voti
[15] Re: Deviatore elettronico
![]() da
da ![]() giorgik » 24 lug 2015, 15:39
giorgik » 24 lug 2015, 15:39
Ottima idea Orionis. Sì obiuan, è esattamente come hai sintetizzato. Pensavo fosse già chiaro questo punto. Scusatemi tutti se non l'ho fatto.
L'idea di Orionis, mi piace, anche perché i PIC li so programmare. Io posseggo anche il driver per comandare motoriduttori, della Pololu, che in pratica riassume quanto da te detto. Ma la mia domanda, è possibile non usare i PIC o il Pololu per fare ciò che volevo (e che è stato descritto bene da obiuan) ma solo il TIP107 ed eventualmente il CD4066 ?
L'idea di Orionis, mi piace, anche perché i PIC li so programmare. Io posseggo anche il driver per comandare motoriduttori, della Pololu, che in pratica riassume quanto da te detto. Ma la mia domanda, è possibile non usare i PIC o il Pololu per fare ciò che volevo (e che è stato descritto bene da obiuan) ma solo il TIP107 ed eventualmente il CD4066 ?
0
voti
[16] Re: Deviatore elettronico
![]() da
da ![]() obiuan » 24 lug 2015, 15:58
obiuan » 24 lug 2015, 15:58
giorgik ha scritto:...Ma la mia domanda, è possibile non usare i PIC o il Pololu per fare ciò che volevo (e che è stato descritto bene da obiuan) ma solo il TIP107 ed eventualmente il CD4066 ?
Con i soli transistor non viene bene, non c'è spazio di polarizzazione. Lo schema che hai postato è esatto? l'hai montato?
_______________________________________________________
Gli oscillatori non oscillano mai, gli amplificatori invece sempre
Io HO i poteri della supermucca, e ne vado fiero!
Gli oscillatori non oscillano mai, gli amplificatori invece sempre
Io HO i poteri della supermucca, e ne vado fiero!
0
voti
[17] Re: Deviatore elettronico
![]() da
da ![]() giorgik » 24 lug 2015, 18:58
giorgik » 24 lug 2015, 18:58
Sì, montato e funziona benissimo in entrambe le configurazioni. Mi potete dire perché non dovrebbe funzionare ? Inoltre vorrei sapere come ottenere le misure sulle caratteristiche del motore citate da MarcoD. Per quanto riguarda il TIP107 si ha un hFE che va da un minimo di 1000 ad un massimo di 20000. Inoltre tengo a precisare che si tratta di un Darlington e che quindi la VBE = 1.4V
0
voti
[18] Re: Deviatore elettronico
![]() da
da ![]() paofanello » 24 lug 2015, 20:37
paofanello » 24 lug 2015, 20:37
Se hai spazio e non vuoi usare il PIC, potresti costruirti i due circuiti in parallelo, con il 4066 (e un po' di accorgimenti) ne fai funzionare uno o l'altro.
Anzi:
Adesso non ho molto tempo di pensarci ma con il 4066 potresti, invece di INVERTIRE resistore e ldr, realizzare due partitori di tensione diversi, e polarizzare il transistor con un partitore di tensione o con l'altro a seconda dei casi, così da poterti scegliere un resistore apposito per la configurazione "eccitante" e uno con altro valore per quella "inibitrice".
Non fidarti di me, secondo voi altri più esperti può funzionare?
Edit: Non è che non dovrebbe funzionare invertendo semplicemente il partitore, un problema è che se il motore è fermo non significa che sia spento, assorbe un sacco di corrente e si rovina transistor e motore.
Anzi:
Adesso non ho molto tempo di pensarci ma con il 4066 potresti, invece di INVERTIRE resistore e ldr, realizzare due partitori di tensione diversi, e polarizzare il transistor con un partitore di tensione o con l'altro a seconda dei casi, così da poterti scegliere un resistore apposito per la configurazione "eccitante" e uno con altro valore per quella "inibitrice".
Non fidarti di me, secondo voi altri più esperti può funzionare?
Edit: Non è che non dovrebbe funzionare invertendo semplicemente il partitore, un problema è che se il motore è fermo non significa che sia spento, assorbe un sacco di corrente e si rovina transistor e motore.
Piuttosto che chiedere qualcosa a me, chiedila a Mara Maionchi. E' più competente.
-

 paofanello
paofanello
2.280 8 13 - Expert

- Messaggi: 532
- Iscritto il: 7 lug 2015, 21:01
0
voti
[19] Re: Deviatore elettronico
![]() da
da ![]() Orionis » 25 lug 2015, 10:15
Orionis » 25 lug 2015, 10:15
giorgik ha scritto:Ma la mia domanda, è possibile non usare i PIC o il Pololu per fare ciò che volevo (e che è stato descritto bene da obiuan) ma solo il TIP107 ed eventualmente il CD4066 ?
A questo punto pero' non capisco se la tua é una sfida intellettuale oppure una richiesta di risoluzione per un problema pratico.
Se è una sfida intellettuale, allora la soluzione può divenire progettualmente molto complessa (al di la' delle mie competenze teoriche) e senza un reale contributo realizzativo.
Se è pratica, allora direi che personalmente ti ho dato due dritte: escludendo se vuoi la soluzione 'intelligente', puoi adattare il circuito http://www.electroyou.it/forum/viewtopic.php?f=1&t=59540#p591972 usando il 4066 al posto del rele'.
Nemmeno gli Dei possono nulla contro la stupidità umana ?
0
voti
[20] Re: Deviatore elettronico
![]() da
da ![]() obiuan » 25 lug 2015, 11:27
obiuan » 25 lug 2015, 11:27
giorgik ha scritto:Sì, montato e funziona benissimo in entrambe le configurazioni. Mi potete dire perché non dovrebbe funzionare ?
funziona suppongo significhi che "effettivamente gira se c'è luce e smette quando c'è buio" (e l'opposto nell'altra configurazione). Ma davvero gira "tanto più veloce quanta più luce vede"? o forse gira sempre alla velocità massima?
_______________________________________________________
Gli oscillatori non oscillano mai, gli amplificatori invece sempre
Io HO i poteri della supermucca, e ne vado fiero!
Gli oscillatori non oscillano mai, gli amplificatori invece sempre
Io HO i poteri della supermucca, e ne vado fiero!
Chi c’è in linea
Visitano il forum: Nessuno e 135 ospiti