
 Elettrotecnica e non solo (admin)
Elettrotecnica e non solo (admin) Un gatto tra gli elettroni (IsidoroKZ)
Un gatto tra gli elettroni (IsidoroKZ) Esperienza e simulazioni (g.schgor)
Esperienza e simulazioni (g.schgor) Moleskine di un idraulico (RenzoDF)
Moleskine di un idraulico (RenzoDF) Il Blog di ElectroYou (webmaster)
Il Blog di ElectroYou (webmaster) Idee microcontrollate (TardoFreak)
Idee microcontrollate (TardoFreak) PICcoli grandi PICMicro (Paolino)
PICcoli grandi PICMicro (Paolino) Il blog elettrico di carloc (carloc)
Il blog elettrico di carloc (carloc) DirtEYblooog (dirtydeeds)
DirtEYblooog (dirtydeeds) Di tutto... un po' (jordan20)
Di tutto... un po' (jordan20) AK47 (lillo)
AK47 (lillo) Esperienze elettroniche (marco438)
Esperienze elettroniche (marco438) Telecomunicazioni musicali (clavicordo)
Telecomunicazioni musicali (clavicordo) Automazione ed Elettronica (gustavo)
Automazione ed Elettronica (gustavo) Direttive per la sicurezza (ErnestoCappelletti)
Direttive per la sicurezza (ErnestoCappelletti) EYnfo dall'Alaska (mir)
EYnfo dall'Alaska (mir) Apriamo il quadro! (attilio)
Apriamo il quadro! (attilio) H7-25 (asdf)
H7-25 (asdf) Passione Elettrica (massimob)
Passione Elettrica (massimob) Elettroni a spasso (guidob)
Elettroni a spasso (guidob) Bloguerra (guerra)
Bloguerra (guerra)Salve a tutti,
ho realizzato un ponte H per controllare un motore DC Gear Motor GM3.
Riporto lo schema realizzato in FidoCadJ
Con il motore non funziona, ma se collego un piezo suona! Inoltre funziona anche la logica del ponte perché il piezo suona solo se collegato nella polarità corretta cioè quella imposta dai valori delle tensioni sui pin A e B.
Secondo voi qual è il problema?
Ponte H per controllo di un motore
Moderatori: ![]() carloc,
carloc, ![]() g.schgor,
g.schgor, ![]() BrunoValente,
BrunoValente, ![]() IsidoroKZ
IsidoroKZ
14 messaggi
• Pagina 1 di 2 • 1, 2



0
voti
[2] Re: Ponte H per controllo di un motore
![]() da
da ![]() Candy » 26 apr 2014, 21:03
Candy » 26 apr 2014, 21:03
Con il ponte realizzato in questo modo, (il mio preferito in termini energetici), è importantissimo essere certo dei livelli di tensione raggiunti dai terminali di controllo, perché si rischia con molta facilità di far lavorare i transistor come stufe invece che da interruttori.
Il carico di un piezo è insignificante rispetto ad un motore. Il piezo è un condensatore, il motore un carico ohmico induttivo.
Quindi:
- valori di tensione off ed on delle uscite di controllo?
- corrente massima delle uscite digitali?
- tipo di transistor?
- hfe?
- resistenza a vuoto del motore usato?
- potenza nominale del motore usato?
Il carico di un piezo è insignificante rispetto ad un motore. Il piezo è un condensatore, il motore un carico ohmico induttivo.
Quindi:
- valori di tensione off ed on delle uscite di controllo?
- corrente massima delle uscite digitali?
- tipo di transistor?
- hfe?
- resistenza a vuoto del motore usato?
- potenza nominale del motore usato?
-

 Candy
Candy
32,5k 7 10 13 - CRU - Account cancellato su Richiesta utente
- Messaggi: 10123
- Iscritto il: 14 giu 2010, 22:54
0
voti
[3] Re: Ponte H per controllo di un motore
![]() da
da ![]() gammaci » 26 apr 2014, 21:16
gammaci » 26 apr 2014, 21:16
Buonasera! Il GM3 è piccolino, la corrente di stallo è di 700 mA a 6 V  .
.
Le info dettagliate possono essere reperite qui
x Nunziox filtrerei i 5 V al micro in un qualche modo. Oppure alimentare il motore a 6 e il micro a 5. Quando il motore è alimentato ti ritrovi sulla VCC dei picchi che possono dar fastidio al micro.
Nunziox filtrerei i 5 V al micro in un qualche modo. Oppure alimentare il motore a 6 e il micro a 5. Quando il motore è alimentato ti ritrovi sulla VCC dei picchi che possono dar fastidio al micro.

Le info dettagliate possono essere reperite qui
x


0
voti
[4] Re: Ponte H per controllo di un motore
![]() da
da ![]() Candy » 26 apr 2014, 21:23
Candy » 26 apr 2014, 21:23
Beh, allora, comincerei a mettere delle resistenze di base ai transistor di 200 ohm, ammesso che i terminali digitali reggano una corrente d'uscita di 20 mA, ma, mi preoccupano i livelli di tensione raggiunte in uscita.
Così, molto a naso, ho la sensazione che con quello schema non girerà affatto, o, poco.
Per assicurare circa 5 V al motore, considerando le varie c.d.t., partirei da una alimentazione di qualche volt in più e, soprattutto, c'è da rivedere il ponte ad H perché dubito che Arduino riesca a polarizzare correttamente i transistor di potenza.
Ci sono molte discussioni sul ponte ad H sul forum.
Così, molto a naso, ho la sensazione che con quello schema non girerà affatto, o, poco.
Per assicurare circa 5 V al motore, considerando le varie c.d.t., partirei da una alimentazione di qualche volt in più e, soprattutto, c'è da rivedere il ponte ad H perché dubito che Arduino riesca a polarizzare correttamente i transistor di potenza.
Ci sono molte discussioni sul ponte ad H sul forum.
-
Candy
32,5k 7 10 13 - CRU - Account cancellato su Richiesta utente
- Messaggi: 10123
- Iscritto il: 14 giu 2010, 22:54
0
voti
[5] Re: Ponte H per controllo di un motore
![]() da
da ![]() EcoTan » 26 apr 2014, 21:38
EcoTan » 26 apr 2014, 21:38
Candy ha scritto:il mio preferito in termini energetici
ma durante la commutazione c'è un istante in cui il ponte risulta in cto/cto. Per salvare capra e cavolo io uso questo:
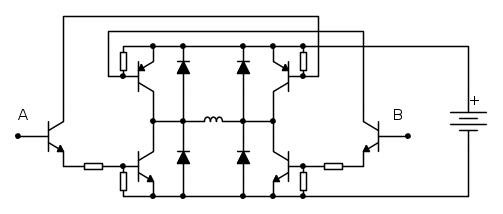
con cui ovviamente bisogna dare alto A o B o nessuno ma MAI entrambi.


0
voti
[6] Re: Ponte H per controllo di un motore
![]() da
da ![]() Candy » 26 apr 2014, 21:44
Candy » 26 apr 2014, 21:44
Bello, risolve alcuni problemi tra quelli che ho elencato, anche se non risolve il problema che hai contestato a me. 
-
Candy
32,5k 7 10 13 - CRU - Account cancellato su Richiesta utente
- Messaggi: 10123
- Iscritto il: 14 giu 2010, 22:54
3
voti
[7] Re: Ponte H per controllo di un motore
![]() da
da ![]() EcoTan » 26 apr 2014, 22:00
EcoTan » 26 apr 2014, 22:00
E' un po' diverso. Col mio schema, se lasciamo il dovuto dead time fra il comando A e il comando B, non c'è cortocircuito neppure per un istante. Col circuito inizialmente proposto da Nunziox, invece, durante la commutazione, dovendo pensare che la tensione di comando sul pin A (o sul pin B) vari con continuità dal livello alto al livello basso o viceversa, deve attraversare dei valori con cui mette il ponte in cortocircuito indipendentemente dal dead time.
0
voti
[8] Re: Ponte H per controllo di un motore
![]() da
da ![]() Nunziox » 27 apr 2014, 10:37
Nunziox » 27 apr 2014, 10:37
Grazie a tutti per le risposte 
Corrente in uscita per I/O Pin 40 mA (Arduino UNO)
2N3906 - PNP -datasheet: http://www.onsemi.com/pub_link/Collateral/2N3906-D.PDF
293904 - NPN -datasheet: http://www.onsemi.com/pub_link/Collateral/2N3903-D.PDF
Sul datasheet sono riportati i vari valori che può assumere la hfe in diverse condizioni.
http://www.onsemi.com/pub_link/Collateral/2N3906-D.PDF
Nel caso del 2N3906:
(IC = 0.1 mAdc, VCE = 1.0 Vdc) , hFEmin=60
(IC = 1.0 mAdc, VCE = 1.0 Vdc) , hFEmin=80
(IC = 10 mAdc, VCE = 1.0 Vdc) , hFEmin=100,hFEmax=300
(IC = 50 mAdc, VCE = 1.0 Vdc) , hFEmin= 60
(IC = 100 mAdc, VCE = 1.0 Vdc) , hFEmin=30
Questi sono momentaneamente i dati che ho trovato relativi al motore, possono esserti utili?
Gear Ratio 224:1
Unloaded RPM (3V) 23
Unloaded RPM (6V) 43
Unloaded Current (3V) 45 mA
Unloaded Current (6V) 62 mA
Stall Current (3V) 389 mA
Stall Current (6V) 733 mA
Stall Torque (3V) 42.33 in.-oz. (3048 g-cm)
Stall Torque (6V) 73.55 in.-oz. (5296 g-cm)
Length 70mm (2.76 in)
Width 22.5mm (0.89 in)
Height 37mm (1.46 in)
Shaft Size 9mm; 7mm diameter
Weight 37g (1.3 oz)
Intendi i valori dei due pin digitali di arduino collegati ai morsetti A e B del ponte?
l dati tecnici dicono con alimentazione Vcc = 5V:
Se Vout è LOW max 0,9V
Se Vout è HIGH min 4,2V
- corrente massima delle uscite digitali?
Corrente in uscita per I/O Pin 40 mA (Arduino UNO)
- tipo di transistor?
2N3906 - PNP -datasheet: http://www.onsemi.com/pub_link/Collateral/2N3906-D.PDF
293904 - NPN -datasheet: http://www.onsemi.com/pub_link/Collateral/2N3903-D.PDF
- hfe?
Sul datasheet sono riportati i vari valori che può assumere la hfe in diverse condizioni.
http://www.onsemi.com/pub_link/Collateral/2N3906-D.PDF
Nel caso del 2N3906:
(IC = 0.1 mAdc, VCE = 1.0 Vdc) , hFEmin=60
(IC = 1.0 mAdc, VCE = 1.0 Vdc) , hFEmin=80
(IC = 10 mAdc, VCE = 1.0 Vdc) , hFEmin=100,hFEmax=300
(IC = 50 mAdc, VCE = 1.0 Vdc) , hFEmin= 60
(IC = 100 mAdc, VCE = 1.0 Vdc) , hFEmin=30
- resistenza a vuoto del motore usato?
- potenza nominale del motore usato?
Questi sono momentaneamente i dati che ho trovato relativi al motore, possono esserti utili?
Gear Ratio 224:1
Unloaded RPM (3V) 23
Unloaded RPM (6V) 43
Unloaded Current (3V) 45 mA
Unloaded Current (6V) 62 mA
Stall Current (3V) 389 mA
Stall Current (6V) 733 mA
Stall Torque (3V) 42.33 in.-oz. (3048 g-cm)
Stall Torque (6V) 73.55 in.-oz. (5296 g-cm)
Length 70mm (2.76 in)
Width 22.5mm (0.89 in)
Height 37mm (1.46 in)
Shaft Size 9mm; 7mm diameter
Weight 37g (1.3 oz)
- valori di tensione off ed on delle uscite di controllo?
Intendi i valori dei due pin digitali di arduino collegati ai morsetti A e B del ponte?
l dati tecnici dicono con alimentazione Vcc = 5V:
Se Vout è LOW max 0,9V
Se Vout è HIGH min 4,2V
0
voti
[9] Re: Ponte H per controllo di un motore
![]() da
da ![]() Nunziox » 27 apr 2014, 15:23
Nunziox » 27 apr 2014, 15:23
In risposta a gamasci:
Ho provato ma purtroppo continua a non funzionanare !
Inoltre i transistor riscaldano in maniera pazzesca.
\Oppure alimentare il motore a 6 e il micro a 5.
Ho provato ma purtroppo continua a non funzionanare !
Inoltre i transistor riscaldano in maniera pazzesca.
0
voti
[10] Re: Ponte H per controllo di un motore
![]() da
da ![]() EcoTan » 27 apr 2014, 20:39
EcoTan » 27 apr 2014, 20:39
Siamo sicuri che il motore è libero di girare? I comandi sono fissi o c'è un PWM, in tal caso non è che la frequenza sia eccessiva? Le resistenze da 1 kohm puoi ridurle per saturare con più sicurezza i transistor.
14 messaggi
• Pagina 1 di 2 • 1, 2
Chi c’è in linea
Visitano il forum: Nessuno e 103 ospiti