paofanello ha scritto: Ho fatto un allineamento il più preciso possibile, certamente non sarà mai perfetto..
Bene, allora puoi considerare che l'errore di allineamento su un asse agisca da disturbo sulla catena di controllo dell'altro ( c'è una relazione "incrociata" tra i due ). Se non la conosci non tentare di modellarla ma cerca di compensarla come disturbo visto che gli assi sono ambedue controllati in retroazione per cui il disturbo viene annullato per definizione a patto di avere nella catena l'integratore ( in questo caso ne hai ben due ).
paofanello ha scritto: E devo ricavare qualche informazione su questo disturbo?
Questa è una domanda che implicherebbe una risposta di lunghezza improponibile per un thread.
Mettiamola in questi termini : Il disturbo lo puoi stimare in ampiezza ed in frequenza ?
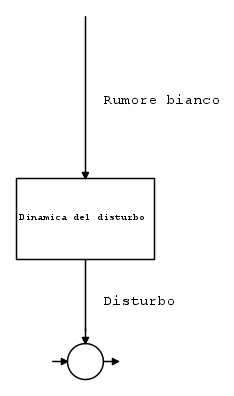
Se si allora puoi modellare il tutto in questo modo :
Vedi il disturbo come un segnale generato da un rumore bianco in ingresso ad un filtro opportuno.
Questa modellazione ti permette di stimare il disturbo e quindi puoi compensarlo in
feedforward.
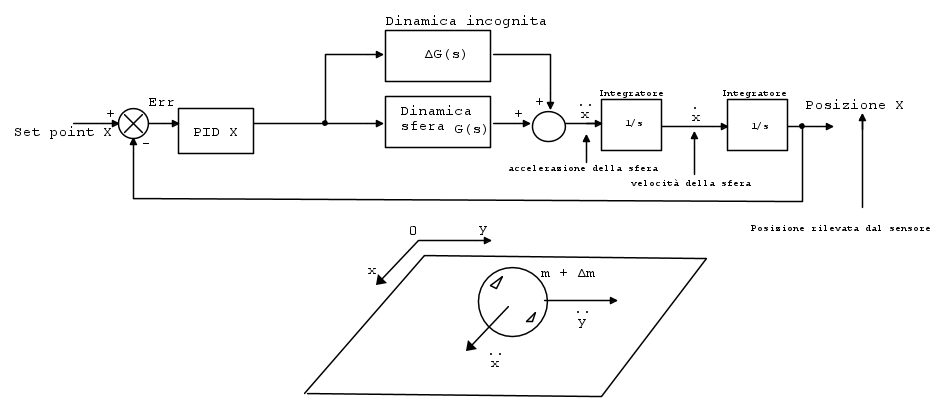
Una alternativa è quella di non vedere il disturbo in quel modo ma considerare il processo da controllare come
 + \Delta G(s)")
dove
")
è la variazione del processo da controllare rispetto a quello nominale ( variazione additiva )
Ipotizziamo cosa potrebbe essere
.
Siccome gli attuatori si muovono con un certo ritardo rispetto al comando e la piattaforma ha una certa inerzia potresti vedere il tutto come un filtro del primo ordine posto in serie alla dinamica della sfera che rallenta la dinamica totale.
Questo potrebbe essere simulato considerando che in realtà la sfera pesa di più e quindi si muove in ritardo ( visto che aumenta l'inerzia ) rispetto a quanto atteso ovvero si simula il tutto con una massa pari a

anzichè

( invece di modellare l'intera piattaforma e gli attuatori ).
E' vero che il processo reale le cose funzionano diversamente ma dal punto di vista del controllore vedi qualcosa che è similabile ad una massa maggiore per cui ai fini della sintesi funziona perché è pur sempre un modello approssimato della realtà.
Per semplificare il discorso devi pensare "ciò che accade fisicamente" e non " ciò che è il sistema".
Chiaro che modellando il sistema con precisione potresti sintetizzare un controllo migliore ma siamo sicuri che serva ?
Tanto vale semplificare con alcune ipotesi sensate e procedere su una strada percorribile.

Capisco che nell'immediato certe considerazioni possano non risultarti familiari ma spero di averti almeno fornito qualche spunto di riflessione con un discorso intuitivo anzichè matematico / formale.

Se dimensioni il controllore per masse diverse da quella nominale ( valori in un range opportuno ) riuscirai a tenere conto ( robustezza ) del fatto che la piattaforma non è ideale.
Ho fatto l'ipotesi semplificativa ( emulazione delle parti non modellate con una variazione della massa della sfera ) perché tutti gli effetti spuri sono similabili a piccoli ritardi ed inerzie aggiuntive. E' ovvio che se dovessi tener conto dei giochi dei giunti non potrei modellare in quel modo.

 Elettrotecnica e non solo (admin)
Elettrotecnica e non solo (admin) Un gatto tra gli elettroni (IsidoroKZ)
Un gatto tra gli elettroni (IsidoroKZ) Esperienza e simulazioni (g.schgor)
Esperienza e simulazioni (g.schgor) Moleskine di un idraulico (RenzoDF)
Moleskine di un idraulico (RenzoDF) Il Blog di ElectroYou (webmaster)
Il Blog di ElectroYou (webmaster) Idee microcontrollate (TardoFreak)
Idee microcontrollate (TardoFreak) PICcoli grandi PICMicro (Paolino)
PICcoli grandi PICMicro (Paolino) Il blog elettrico di carloc (carloc)
Il blog elettrico di carloc (carloc) DirtEYblooog (dirtydeeds)
DirtEYblooog (dirtydeeds) Di tutto... un po' (jordan20)
Di tutto... un po' (jordan20) AK47 (lillo)
AK47 (lillo) Esperienze elettroniche (marco438)
Esperienze elettroniche (marco438) Telecomunicazioni musicali (clavicordo)
Telecomunicazioni musicali (clavicordo) Automazione ed Elettronica (gustavo)
Automazione ed Elettronica (gustavo) Direttive per la sicurezza (ErnestoCappelletti)
Direttive per la sicurezza (ErnestoCappelletti) EYnfo dall'Alaska (mir)
EYnfo dall'Alaska (mir) Apriamo il quadro! (attilio)
Apriamo il quadro! (attilio) H7-25 (asdf)
H7-25 (asdf) Passione Elettrica (massimob)
Passione Elettrica (massimob) Elettroni a spasso (guidob)
Elettroni a spasso (guidob) Bloguerra (guerra)
Bloguerra (guerra)