Elettrotecnica e non solo (admin)
Elettrotecnica e non solo (admin) Un gatto tra gli elettroni (IsidoroKZ)
Un gatto tra gli elettroni (IsidoroKZ) Esperienza e simulazioni (g.schgor)
Esperienza e simulazioni (g.schgor) Moleskine di un idraulico (RenzoDF)
Moleskine di un idraulico (RenzoDF) Il Blog di ElectroYou (webmaster)
Il Blog di ElectroYou (webmaster) Idee microcontrollate (TardoFreak)
Idee microcontrollate (TardoFreak) PICcoli grandi PICMicro (Paolino)
PICcoli grandi PICMicro (Paolino) Il blog elettrico di carloc (carloc)
Il blog elettrico di carloc (carloc) DirtEYblooog (dirtydeeds)
DirtEYblooog (dirtydeeds) Di tutto... un po' (jordan20)
Di tutto... un po' (jordan20) AK47 (lillo)
AK47 (lillo) Esperienze elettroniche (marco438)
Esperienze elettroniche (marco438) Telecomunicazioni musicali (clavicordo)
Telecomunicazioni musicali (clavicordo) Automazione ed Elettronica (gustavo)
Automazione ed Elettronica (gustavo) Direttive per la sicurezza (ErnestoCappelletti)
Direttive per la sicurezza (ErnestoCappelletti) EYnfo dall'Alaska (mir)
EYnfo dall'Alaska (mir) Apriamo il quadro! (attilio)
Apriamo il quadro! (attilio) H7-25 (asdf)
H7-25 (asdf) Passione Elettrica (massimob)
Passione Elettrica (massimob) Elettroni a spasso (guidob)
Elettroni a spasso (guidob) Bloguerra (guerra)
Bloguerra (guerra)
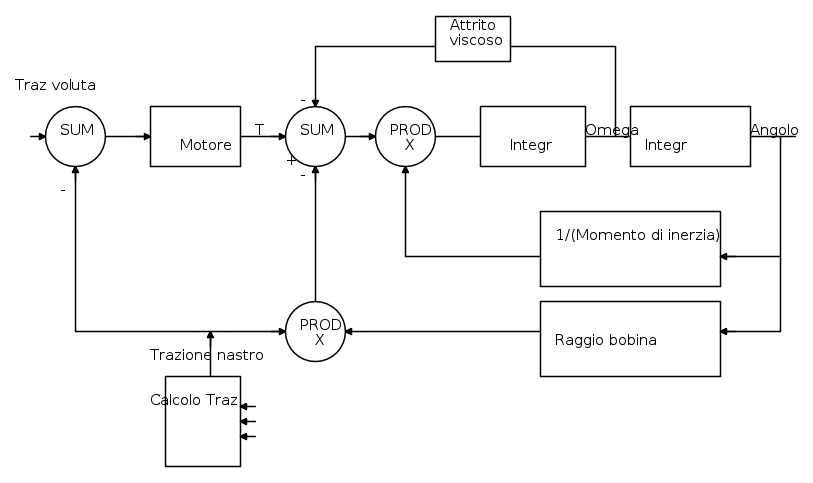
g.schgor ha scritto:Essenzialmente da : , integrando ottieni .
Cm è la coppia che il motore effettivamente eroga?
Cioè nel mio caso io do un comando di coppia al motore, per es 1N*m. Questo vuol dire che il motore deve erogare (dato che è controllato dal servoazionamento) proprio 1N*m. Quindi questa coppia che eroga è Cm?? oppure la coppia che eroga è la differenza tra Cm e Cr?
Per fare lo schema a bloccho di questa parte, come faccio? cioè devo praticamente buttare giu una parte del modello del controllo del motore brushless....
chiara85chiara ha scritto:s: quindi ogni volta che implemento un controllo anche integrativo devo mettere un blocco di saturazione all'uscita del blocco integrativo? e questa saturazione deve sempre avere valore da 0-10V?
Mi sa rispondere per favore? Vorrei capire bene come comportarmi quando inserisco un blocco integrativo in uno schema di controllo. So dalla teoria che dopo tale blocco ci va un saturatore perché altrimenti si rischia di danneggiare il sistema, però non so effettivamente come tarare questo saturatore.
Grazie mille ancora di tutto!


 .
.