
 Elettrotecnica e non solo (admin)
Elettrotecnica e non solo (admin) Un gatto tra gli elettroni (IsidoroKZ)
Un gatto tra gli elettroni (IsidoroKZ) Esperienza e simulazioni (g.schgor)
Esperienza e simulazioni (g.schgor) Moleskine di un idraulico (RenzoDF)
Moleskine di un idraulico (RenzoDF) Il Blog di ElectroYou (webmaster)
Il Blog di ElectroYou (webmaster) Idee microcontrollate (TardoFreak)
Idee microcontrollate (TardoFreak) PICcoli grandi PICMicro (Paolino)
PICcoli grandi PICMicro (Paolino) Il blog elettrico di carloc (carloc)
Il blog elettrico di carloc (carloc) DirtEYblooog (dirtydeeds)
DirtEYblooog (dirtydeeds) Di tutto... un po' (jordan20)
Di tutto... un po' (jordan20) AK47 (lillo)
AK47 (lillo) Esperienze elettroniche (marco438)
Esperienze elettroniche (marco438) Telecomunicazioni musicali (clavicordo)
Telecomunicazioni musicali (clavicordo) Automazione ed Elettronica (gustavo)
Automazione ed Elettronica (gustavo) Direttive per la sicurezza (ErnestoCappelletti)
Direttive per la sicurezza (ErnestoCappelletti) EYnfo dall'Alaska (mir)
EYnfo dall'Alaska (mir) Apriamo il quadro! (attilio)
Apriamo il quadro! (attilio) H7-25 (asdf)
H7-25 (asdf) Passione Elettrica (massimob)
Passione Elettrica (massimob) Elettroni a spasso (guidob)
Elettroni a spasso (guidob) Bloguerra (guerra)
Bloguerra (guerra)
Driver motori in c.c.
Moderatori: ![]() carloc,
carloc, ![]() g.schgor,
g.schgor, ![]() BrunoValente,
BrunoValente, ![]() IsidoroKZ
IsidoroKZ
28 messaggi
• Pagina 2 di 3 • 1, 2, 3
0
voti
[11] Re: Driver motori DC
![]() da
da ![]() claudiocedrone » 8 mar 2014, 14:15
claudiocedrone » 8 mar 2014, 14:15
"Non farei mai parte di un club che accettasse la mia iscrizione" (G. Marx)
-

 claudiocedrone
claudiocedrone
21,3k 4 7 9 - Master EY

- Messaggi: 15302
- Iscritto il: 18 gen 2012, 13:36
11
voti
[12] Re: Driver motori DC
![]() da
da ![]() carloc » 8 mar 2014, 18:32
carloc » 8 mar 2014, 18:32
Beh non è che sia niente ne di nuovo ne di tragicamente migliore  ....
....
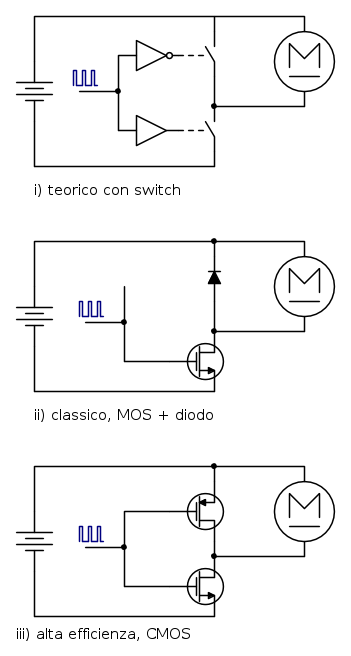
semplicemente, visto che anche il diodo di ricircolo dissipa la sua brava fetta e va a finire che è il componente che dissipa e scalda più di tutti e visto anche che per meno di 1€ ci possiamo prendere dei bei MOS complementari in SOIC8 (roba da decine di milliohm, alcuni ampere di IDmax)...
<<... perché non facciamo attivo anche lo switch "di sopra" ?>>
tutto qui
Ci sono solo alcune cosette da verificare/considerare:
i) il pilotaggio dei gate non ha problemi statici se uP (la porta di uscita) e motore sono alimentati dalla stessa tensione. Così siamo sicuri di spegnere ben bene anche il PMOS.
ii) Dipende fortemente dalla frequenza del PWM ma il pilotaggio dinamico potrebbe non aver problemi neanche lui, ma qui vorrei un po' vedere alcune cosette:
ii_a) la corrente di shoot-through, cioè durante le transizioni H->L e L->H ci saranno dei momenti in cui entrambi i MOS sono in conduzione creando una specie di cortocircuito sull'alimentazione. Questo potrebbe non essere un problema in ragione della "rapidità" della transizione (se la corrente scorre per un breve periodo la corrente media sarà "bassa" e accettabile) e anche in ragione del fatto che le tensioni di soglia dei due MOS potrebbero anche essere alte a sufficienza da evitare o limitare questa conduzione contemporanea.
ii_b) la dissipazione dinamica, cioè durante gli spegnimenti e accensioni ci saranno dei momenti con contemporaneamente tensione e corrente "elevate" nei MOS con dei picchi di potenza dissipata. Anche in questo caso la rapidità di questa transizione garantisce di minimizzare la media di questa dissipazione dinamica.
....insomma, si devono trovare dei MOS con tensioni di soglia sufficientemente basse da accendersi bene con i 3,7V di alimentazione disponibili (e anche meno con batteria quasi scarica) e poi si deve verificare che il pilotaggio fornito dal uP sia in grado di garantire commutazioni rapide a sufficienza ed infine verificare lo shoot-trough.
Poi è fatta
Naturalmente complicando un po' il pilotaggio con dei dead-time e/o dei buffer di corrente dopo il uP abbiamo tutti i gradi di libertà che ci servono per fare un po' come ci pare, ma vorrei fortemente evitare complicazioni circuitali ché altrimenti direi che non ne vale la pena
semplicemente, visto che anche il diodo di ricircolo dissipa la sua brava fetta e va a finire che è il componente che dissipa e scalda più di tutti e visto anche che per meno di 1€ ci possiamo prendere dei bei MOS complementari in SOIC8 (roba da decine di milliohm, alcuni ampere di IDmax)...
<<... perché non facciamo attivo anche lo switch "di sopra" ?>>
tutto qui
Ci sono solo alcune cosette da verificare/considerare:
i) il pilotaggio dei gate non ha problemi statici se uP (la porta di uscita) e motore sono alimentati dalla stessa tensione. Così siamo sicuri di spegnere ben bene anche il PMOS.
ii) Dipende fortemente dalla frequenza del PWM ma il pilotaggio dinamico potrebbe non aver problemi neanche lui, ma qui vorrei un po' vedere alcune cosette:
ii_a) la corrente di shoot-through, cioè durante le transizioni H->L e L->H ci saranno dei momenti in cui entrambi i MOS sono in conduzione creando una specie di cortocircuito sull'alimentazione. Questo potrebbe non essere un problema in ragione della "rapidità" della transizione (se la corrente scorre per un breve periodo la corrente media sarà "bassa" e accettabile) e anche in ragione del fatto che le tensioni di soglia dei due MOS potrebbero anche essere alte a sufficienza da evitare o limitare questa conduzione contemporanea.
ii_b) la dissipazione dinamica, cioè durante gli spegnimenti e accensioni ci saranno dei momenti con contemporaneamente tensione e corrente "elevate" nei MOS con dei picchi di potenza dissipata. Anche in questo caso la rapidità di questa transizione garantisce di minimizzare la media di questa dissipazione dinamica.
....insomma, si devono trovare dei MOS con tensioni di soglia sufficientemente basse da accendersi bene con i 3,7V di alimentazione disponibili (e anche meno con batteria quasi scarica) e poi si deve verificare che il pilotaggio fornito dal uP sia in grado di garantire commutazioni rapide a sufficienza ed infine verificare lo shoot-trough.
Poi è fatta
Naturalmente complicando un po' il pilotaggio con dei dead-time e/o dei buffer di corrente dopo il uP abbiamo tutti i gradi di libertà che ci servono per fare un po' come ci pare, ma vorrei fortemente evitare complicazioni circuitali ché altrimenti direi che non ne vale la pena
Se ti serve il valore di beta: hai sbagliato il progetto!

2
voti
[13] Re: Driver motori DC
![]() da
da ![]() giorgio25760 » 8 mar 2014, 19:29
giorgio25760 » 8 mar 2014, 19:29
carloc ha scritto:Poi avrei anche una mezza idea un po' matta con due MOS complementari in SOIC8
Non mi sembra niente di matto !
E' una tecnica di normale utilizzo se si vogliono avere alti rendimenti,si chiama rettificazione sincrona.
Ciao
Giorgio
-

 giorgio25760
giorgio25760
2.310 1 3 5 - G.Master EY

- Messaggi: 1700
- Iscritto il: 6 dic 2009, 17:02
- Località: Brescia
0
voti
[14] Re: Driver motori DC
![]() da
da ![]() supergiox » 10 mar 2014, 3:01
supergiox » 10 mar 2014, 3:01
carloc ha scritto:e a questo proposito, quello che hai scelto mi pare assai risicato, vedi se dal tuo fornitore di fiducia ne trovi uno un po' più robusto, che non costerà di più ma avrà una rds(on) molto più bassa e scalderà molto meno
Intanto grazie mille per la risposta! Non credo che si possa essere più esaustivi di così su un forum
Ho cercato altri mosfet simili come caratteristiche ma con una rds un po' più piccola ed ho trovato questi due: 2SK4033 e FDN5630.
Come diodo schottky invece ho trovato il MBR360RLG. Va bene?
Entrambi i mosfet hanno dei pro e dei contro dal mio punto di vista, ma prima di elencarli chiedo conferma sul fatto che vadano bene o meno!
Grazie ancora

1
voti
[16] Re: Driver motori DC
![]() da
da ![]() Paolino » 10 mar 2014, 10:32
Paolino » 10 mar 2014, 10:32
50 Hz è a mio modesto punto di vista un po' troppo bassa come frequenza.
Proverei con valori compresi tra 5kHz e 10kHz
Ciao.
Paolo.
Proverei con valori compresi tra 5kHz e 10kHz
Ciao.
Paolo.
"Houston, Tranquillity Base here. The Eagle has landed." - Neil A.Armstrong
-------------------------------------------------------------
PIC Experience - http://www.picexperience.it
-------------------------------------------------------------
PIC Experience - http://www.picexperience.it
-

 Paolino
Paolino
32,6k 8 12 13 - G.Master EY
- Messaggi: 4226
- Iscritto il: 20 gen 2006, 11:42
- Località: Vigevano (PV)
1
voti
[17] Re: Driver motori DC
![]() da
da ![]() WALTERmwp » 10 mar 2014, 12:38
WALTERmwp » 10 mar 2014, 12:38
Ciao supergiox,
mi accodo alla discussione senza aggiungere nulla di più a quanto ti ha riportato @carloc anzi, seguo il thread così imparo qualcosa anch'io da lui, però ne approfitto per qualche chiarimento.
In riferimento alle "dimensioni"
può darsi che sia effettivamente così ma meno di mezzo etto mi sembra davvero poco.
So che ci sono dei quadcopter veramente piccoli ma sei certo che il peso del tuo sia quello (dev'essere proprio di dimensioni ridotte !) ?
Tra struttura e quindi telaio ed eliche poi elettronica (micro di controllo, esc, ...), motori e batterie ... insomma ogni "componente" fa la sua parte.
Per quanto riguarda l'identificazione dei motori hai provato ad osservarli "in controluce" ?
A volte, a prima vista, non si vede alcuna sigla mentre osservandoli con più attenzione ci si accorge che magari qualcosa risulta stampato proprio sulla parte metallica.
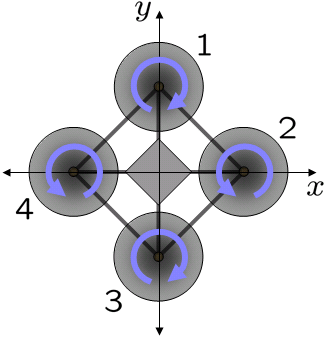
Ne scrivo un'altra, ma proprio per non escludere nulla a priori quindi per favore non dargli peso nel caso in cui l'osservazione non dovesse avere nulla a che fare con quello che hai segnalato: il modellino dici che non si alza ma oltre a questo non è che magari gira su se stesso (in tal caso potresti non avere i versi di rotazione in opposizione tra i motori su una diagonale rispetto agli altri due) ?
Poi: come ti ha scritto @paolino, " l'ordine di grandezza " della frequenza del PWM dovrebbe essere dei migliaia di Hz; già intorno ai 2kHz potresti riuscire a regolare e ad apprezzare le variazioni di velocità dei motori.
Un'ultima cosa: le dimensioni delle eliche le hai stabilite in base a quanto osservato nei modelli esistenti o hai fatto altre valutazioni ?
(lo chiedo, anche per curiosità, ma penso che la loro grandezza, comunque, vada relazionata con il peso del velivolo e le caratteristiche dei motori)
Saluti
mi accodo alla discussione senza aggiungere nulla di più a quanto ti ha riportato @carloc anzi, seguo il thread così imparo qualcosa anch'io da lui, però ne approfitto per qualche chiarimento.
In riferimento alle "dimensioni"
supergiox ha scritto:Salve a tutti,
sto progettando un mini quadricottero ...
... in grado di sollevare il peso del quadricottero (45g).
può darsi che sia effettivamente così ma meno di mezzo etto mi sembra davvero poco.
So che ci sono dei quadcopter veramente piccoli ma sei certo che il peso del tuo sia quello (dev'essere proprio di dimensioni ridotte !) ?
Tra struttura e quindi telaio ed eliche poi elettronica (micro di controllo, esc, ...), motori e batterie ... insomma ogni "componente" fa la sua parte.
Per quanto riguarda l'identificazione dei motori hai provato ad osservarli "in controluce" ?
A volte, a prima vista, non si vede alcuna sigla mentre osservandoli con più attenzione ci si accorge che magari qualcosa risulta stampato proprio sulla parte metallica.
Ne scrivo un'altra, ma proprio per non escludere nulla a priori quindi per favore non dargli peso nel caso in cui l'osservazione non dovesse avere nulla a che fare con quello che hai segnalato: il modellino dici che non si alza ma oltre a questo non è che magari gira su se stesso (in tal caso potresti non avere i versi di rotazione in opposizione tra i motori su una diagonale rispetto agli altri due) ?
Poi: come ti ha scritto @paolino, " l'ordine di grandezza " della frequenza del PWM dovrebbe essere dei migliaia di Hz; già intorno ai 2kHz potresti riuscire a regolare e ad apprezzare le variazioni di velocità dei motori.
Un'ultima cosa: le dimensioni delle eliche le hai stabilite in base a quanto osservato nei modelli esistenti o hai fatto altre valutazioni ?
(lo chiedo, anche per curiosità, ma penso che la loro grandezza, comunque, vada relazionata con il peso del velivolo e le caratteristiche dei motori)
Saluti
-

 WALTERmwp
WALTERmwp
30,2k 4 8 13 - G.Master EY
- Messaggi: 8989
- Iscritto il: 17 lug 2010, 18:42
- Località: le 4 del mattino
1
voti
[18] Re: Driver motori DC
![]() da
da ![]() supergiox » 10 mar 2014, 18:51
supergiox » 10 mar 2014, 18:51
Ho appena scoperto che mi sbagliavo. I segnali PWM che genero non hanno tutti la stessa frequenza. Al momento tre segnali sono a 490Hz e uno a 980Hz, ma se questo dovesse essere un problema potrei portare anche il quarto a 490Hz.
@WALTERmwp
Sì, il peso è proprio di 45 grammi ed è grande 12cm da motore a motore (in diagonale).
Link cancellato
Spero di ridurlo di altri 5 grammi perché il quadricottero a cui sto facendo riferimento (Hubsan x4) ne pesa circa 40.
Per quanto riguarda i motori, ho provato a cercare qualche scritta ma non c'è niente. In ogni caso sono provvisori... quelli definitivi saranno questi, di cui sa "qualcosa" in più.
Per il fatto che non si alza, intendo dire che si sposta trasversalmente anche a causa delle vibrazioni, ma nessuno dei quattro motori si "stacca" dalla superficie. Ovviamente mi sono assicurato che girino nei versi opportuni.
Le eliche al momento sono anch'esse provvisorie (appartengono comunque ad un modello simile), ma ho già comprato quelle del quadricottero di riferimento.
Le foto devono essere posate direttamente nei messaggi; l'uso di server esterni e' vietato.
I link saranno a breve cancellati.
@
Sì, il peso è proprio di 45 grammi ed è grande 12cm da motore a motore (in diagonale).
Link cancellato
Spero di ridurlo di altri 5 grammi perché il quadricottero a cui sto facendo riferimento (Hubsan x4) ne pesa circa 40.
Per quanto riguarda i motori, ho provato a cercare qualche scritta ma non c'è niente. In ogni caso sono provvisori... quelli definitivi saranno questi, di cui sa "qualcosa" in più.
Per il fatto che non si alza, intendo dire che si sposta trasversalmente anche a causa delle vibrazioni, ma nessuno dei quattro motori si "stacca" dalla superficie. Ovviamente mi sono assicurato che girino nei versi opportuni.
{kind=link}
Le eliche al momento sono anch'esse provvisorie (appartengono comunque ad un modello simile), ma ho già comprato quelle del quadricottero di riferimento.
Le foto devono essere posate direttamente nei messaggi; l'uso di server esterni e' vietato.
I link saranno a breve cancellati.
0
voti
[19] Re: Driver motori DC
![]() da
da ![]() WALTERmwp » 10 mar 2014, 22:26
WALTERmwp » 10 mar 2014, 22:26
... allora, intanto complimenti per il "piccolino".
Mi sembra tu abbia già installato quella che, a vederla così, sembrerebbe un accelerometro a tre assi.
Quindi ho pensato ad un altro fattore, anche se al momento non escluderei comunque il fatto che l'abbinamento eliche/motori non sia in grado di sviluppare la portanza necessaria.
Hai inserito nel controllo dei motori anche la gestione della IMU ?
Hai la possibilità di variare "in manuale" la velocità di rotazione di tutti e quattro i rotori (visto il riferimento che hai inserito, probabilmente implementi quella che è indicata come "analogWrite(pin, value)") ?
Sei quindi in grado di variare il parametro "value" (cioè di variare il duty cycle) ?
Mi sembra tu abbia già installato quella che, a vederla così, sembrerebbe un accelerometro a tre assi.
Quindi ho pensato ad un altro fattore, anche se al momento non escluderei comunque il fatto che l'abbinamento eliche/motori non sia in grado di sviluppare la portanza necessaria.
Hai inserito nel controllo dei motori anche la gestione della IMU ?
Hai la possibilità di variare "in manuale" la velocità di rotazione di tutti e quattro i rotori (visto il riferimento che hai inserito, probabilmente implementi quella che è indicata come "analogWrite(pin, value)") ?
Sei quindi in grado di variare il parametro "value" (cioè di variare il duty cycle) ?
W - U.H.F.
-
WALTERmwp
30,2k 4 8 13 - G.Master EY
- Messaggi: 8989
- Iscritto il: 17 lug 2010, 18:42
- Località: le 4 del mattino
0
voti
[20] Re: Driver motori DC
![]() da
da ![]() WALTERmwp » 10 mar 2014, 23:06
WALTERmwp » 10 mar 2014, 23:06
... un'altra cosa che prima non mi sono dimenticato ma ho notato dopo l'inserimento del mio post [19]: osservando la foto che riporta il quadricottero nello stato attuale mi sembra, dal riflesso sulle eliche, che quelle nere non sono montate nel medesimo verso: potresti controllare ?
Per le altre non saprei dirti, non si riesce ad apprezzare l'inclinazione.
Saluti
Per le altre non saprei dirti, non si riesce ad apprezzare l'inclinazione.
Saluti
W - U.H.F.
-
WALTERmwp
30,2k 4 8 13 - G.Master EY
- Messaggi: 8989
- Iscritto il: 17 lug 2010, 18:42
- Località: le 4 del mattino
28 messaggi
• Pagina 2 di 3 • 1, 2, 3
Chi c’è in linea
Visitano il forum: Nessuno e 153 ospiti