Elettrotecnica e non solo (admin)
Elettrotecnica e non solo (admin) Un gatto tra gli elettroni (IsidoroKZ)
Un gatto tra gli elettroni (IsidoroKZ) Esperienza e simulazioni (g.schgor)
Esperienza e simulazioni (g.schgor) Moleskine di un idraulico (RenzoDF)
Moleskine di un idraulico (RenzoDF) Il Blog di ElectroYou (webmaster)
Il Blog di ElectroYou (webmaster) Idee microcontrollate (TardoFreak)
Idee microcontrollate (TardoFreak) PICcoli grandi PICMicro (Paolino)
PICcoli grandi PICMicro (Paolino) Il blog elettrico di carloc (carloc)
Il blog elettrico di carloc (carloc) DirtEYblooog (dirtydeeds)
DirtEYblooog (dirtydeeds) Di tutto... un po' (jordan20)
Di tutto... un po' (jordan20) AK47 (lillo)
AK47 (lillo) Esperienze elettroniche (marco438)
Esperienze elettroniche (marco438) Telecomunicazioni musicali (clavicordo)
Telecomunicazioni musicali (clavicordo) Automazione ed Elettronica (gustavo)
Automazione ed Elettronica (gustavo) Direttive per la sicurezza (ErnestoCappelletti)
Direttive per la sicurezza (ErnestoCappelletti) EYnfo dall'Alaska (mir)
EYnfo dall'Alaska (mir) Apriamo il quadro! (attilio)
Apriamo il quadro! (attilio) H7-25 (asdf)
H7-25 (asdf) Passione Elettrica (massimob)
Passione Elettrica (massimob) Elettroni a spasso (guidob)
Elettroni a spasso (guidob) Bloguerra (guerra)
Bloguerra (guerra)Devo capire assolutamente che tipo di controllore e' adatto a questo esercizio con queste specifiche.
L'ingresso e' una rampa con errore finito a monte del controllore perciò almeno nel primo caso h deve essere = 1 ,
tipo di sistema = 1 .
Nella seconda specifica pero' , non mi viene richiesto l' astatismo perché' l'errore e' finito e diverso da zero.
In base a queste definizioni , che tipo di controllore devo utilizzare ?
C(s) = Kc oppure c(s) = Kc/s ?

Kd e Kp sono di facile soluzione perche' H(s) = 1/kd = 2
e Kp = 5/12
Ringrazio chi mi aiuta . E' tropo importante per me capire questo concetto.
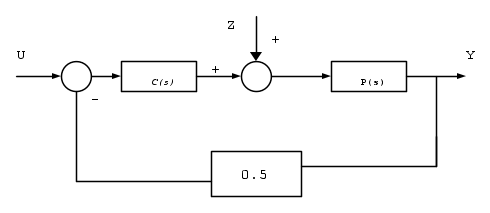
Esercizio :
Dato il sistema di controllo in figura determinare C(s)=Kc/s^h con h minimo in modo da soddisfare le seguenti specifiche a ciclo chiuso senza curarsi della stabilità.
=\delta _-2(t)")


=\delta _-1(t)")

=\frac{s+5}{5s^2+4s+12}")