
 Elettrotecnica e non solo (admin)
Elettrotecnica e non solo (admin) Un gatto tra gli elettroni (IsidoroKZ)
Un gatto tra gli elettroni (IsidoroKZ) Esperienza e simulazioni (g.schgor)
Esperienza e simulazioni (g.schgor) Moleskine di un idraulico (RenzoDF)
Moleskine di un idraulico (RenzoDF) Il Blog di ElectroYou (webmaster)
Il Blog di ElectroYou (webmaster) Idee microcontrollate (TardoFreak)
Idee microcontrollate (TardoFreak) PICcoli grandi PICMicro (Paolino)
PICcoli grandi PICMicro (Paolino) Il blog elettrico di carloc (carloc)
Il blog elettrico di carloc (carloc) DirtEYblooog (dirtydeeds)
DirtEYblooog (dirtydeeds) Di tutto... un po' (jordan20)
Di tutto... un po' (jordan20) AK47 (lillo)
AK47 (lillo) Esperienze elettroniche (marco438)
Esperienze elettroniche (marco438) Telecomunicazioni musicali (clavicordo)
Telecomunicazioni musicali (clavicordo) Automazione ed Elettronica (gustavo)
Automazione ed Elettronica (gustavo) Direttive per la sicurezza (ErnestoCappelletti)
Direttive per la sicurezza (ErnestoCappelletti) EYnfo dall'Alaska (mir)
EYnfo dall'Alaska (mir) Apriamo il quadro! (attilio)
Apriamo il quadro! (attilio) H7-25 (asdf)
H7-25 (asdf) Passione Elettrica (massimob)
Passione Elettrica (massimob) Elettroni a spasso (guidob)
Elettroni a spasso (guidob) Bloguerra (guerra)
Bloguerra (guerra)- Si, ma alla fine, hai capito quale è la scheda Profibus montata? Il suo codice commerciale, di modo da poter cercare il suo file GSD?
- Dentro il controlloer hai trovato i CD del Robot, con il software di coumincazione, i manuali in PDF, e, magari le risorse software, tra cui il GSD delle scheda ?
- Il PLC cosa è alla fine? Della serie 300 ci saranno 300 CPU diverse, oltre poi a tutto l'hardware di contorno. Vuoi per illustrare l'hardware di cui disponi, dal lato PLC, per favore?
Ed inoltre:
- di cosa ti sei occupato sino ad oggi durante lo stage?
- hai una vaga idea di come si mette assieme un sistema automatico?
- hai fatto uno schema elettrico di come collegare PLC e Robot, ad un quadretto di alimentazione e ad una pulsantiera di comando?
- ed al circuito delle emergenze?
- come fornirai i comandi base, oltre che segnalare le anomalie riconosciute?
Come Si Può Interfacciare Un Robot Comau Con Plc Siemens 30
Moderatori: ![]() dimaios,
dimaios, ![]() carlomariamanenti
carlomariamanenti
24 messaggi
• Pagina 2 di 3 • 1, 2, 3
2
voti
[12] Re: Come Si Può Interfacciare Un Robot Comau Con Plc Siemens 30
![]() da
da ![]() Ivan_Iamoni » 24 ago 2011, 14:12
Ivan_Iamoni » 24 ago 2011, 14:12
Personalmente trovo la tua descrizione  ghasem al post precedente piuttosto confusa e superficiale.
ghasem al post precedente piuttosto confusa e superficiale.
Ora perdonami se posso sembrarti ostile e severo, ma mal sopporto chi fa le cose con superficialità solo perché è tirocinante, senza la dovizia di chi invece lo fa perché vuole raggiungere un obbiettivo preciso, questa tua frase per esempio:
Devi per cominciare, definire bene come è fatta la tua applicazione, se non inizi con le idee chiare, non finirai mai la tua realizzazione, nel caso ci riuscissi, ti ci vorrà più tempo ancora a capire perché funziona o a rifarne una identica.
Sei partito dal problema minore, ossia come fare comunicare un controller robot ed un PLC ma manca ancora tutta la parte inziale, come è composta la cella?
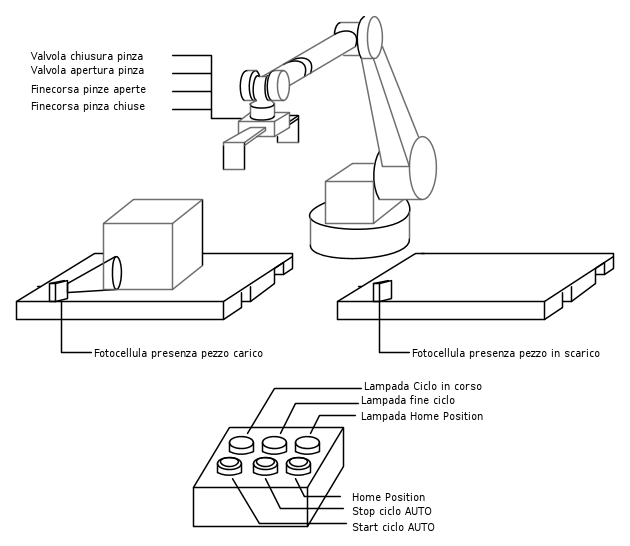
Questo "schizzo" è solo per farti un esempio di isola robotizzata o "cella" come io sono solito dire.
Come vedi, è molto generico, mancano i circuiti di protezione, le barriere, le emergenze e molti comandi importanti, ma in linea di massima è un punto di principio.
Corrisponde a tutto questo la tua applicazione?
Se sì o quasi, completa tu i dispositivi a campo, che devi inserire, e come secondo passo, decidi a quale dispositivo verranno collegati i vari sensori.
Devi redigere una tabella di occupazione delgi ingressi uscite sia del robot che del PLC, meglio se crei una tabella in cui vi siano sia la rapprentazione funzionale che "simbolica" che torna utile nella stesura dei programmi.
Quando avrai stabilito chi controlla "che cosa" , dovrai decidere chi fa "che cosa" ossia un ciclogramma di funzionamento della cella, le varie fasi di lavorazione, le condizioni utili allo svolgimento del ciclo automatico.
Solo dopo avere affrontato queste problematiche, puoi capire di che tipo e di che quantità di dati devono essere trasferiti dal PLC al robot e viceversa, quindi passare alla stesura del progetto PLC cominciando dalla configurazione HW.
Ora perdonami se posso sembrarti ostile e severo, ma mal sopporto chi fa le cose con superficialità solo perché è tirocinante, senza la dovizia di chi invece lo fa perché vuole raggiungere un obbiettivo preciso, questa tua frase per esempio:
è la cigliegina sulla torta.poi devo accendere anke qualche luce quando il robot è il movimento , e in funzionamento,cosi si illumina il robot si vede bene il suo funzionamente,
Devi per cominciare, definire bene come è fatta la tua applicazione, se non inizi con le idee chiare, non finirai mai la tua realizzazione, nel caso ci riuscissi, ti ci vorrà più tempo ancora a capire perché funziona o a rifarne una identica.
Sei partito dal problema minore, ossia come fare comunicare un controller robot ed un PLC ma manca ancora tutta la parte inziale, come è composta la cella?
Questo "schizzo" è solo per farti un esempio di isola robotizzata o "cella" come io sono solito dire.
Come vedi, è molto generico, mancano i circuiti di protezione, le barriere, le emergenze e molti comandi importanti, ma in linea di massima è un punto di principio.
Corrisponde a tutto questo la tua applicazione?
Se sì o quasi, completa tu i dispositivi a campo, che devi inserire, e come secondo passo, decidi a quale dispositivo verranno collegati i vari sensori.
Devi redigere una tabella di occupazione delgi ingressi uscite sia del robot che del PLC, meglio se crei una tabella in cui vi siano sia la rapprentazione funzionale che "simbolica" che torna utile nella stesura dei programmi.
Quando avrai stabilito chi controlla "che cosa" , dovrai decidere chi fa "che cosa" ossia un ciclogramma di funzionamento della cella, le varie fasi di lavorazione, le condizioni utili allo svolgimento del ciclo automatico.
Solo dopo avere affrontato queste problematiche, puoi capire di che tipo e di che quantità di dati devono essere trasferiti dal PLC al robot e viceversa, quindi passare alla stesura del progetto PLC cominciando dalla configurazione HW.
-

 Ivan_Iamoni
Ivan_Iamoni
5.336 6 10 12 - Utente disattivato per decisione dell'amministrazione proprietaria del sito
- Messaggi: 2330
- Iscritto il: 22 ott 2006, 18:45
0
voti
[13] Re: Come Si Può Interfacciare Un Robot Comau Con Plc Siemens 30
![]() da
da ![]() Candy » 24 ago 2011, 17:46
Candy » 24 ago 2011, 17:46
Quota senza esitazione il nostro moderatore Ivan_Iamoni. Il suo post spiega efficaciemente quello che andrebbe sempre fatto e non si vede MAI...
-

 Candy
Candy
32,5k 7 10 13 - CRU - Account cancellato su Richiesta utente
- Messaggi: 10123
- Iscritto il: 14 giu 2010, 22:54
0
voti
[14] Re: Come Si Può Interfacciare Un Robot Comau Con Plc Siemens 30
![]() da
da ![]() ghasem » 25 ago 2011, 10:42
ghasem » 25 ago 2011, 10:42
vi ringrazio tanto per la disponibilità, allora sul robot ancora non è montato il profbus,quindi dobbiamo montare, spiego un po il progetto , sono 3 tavoli per mangiare, e il robot deve fare il lavoro di cameriere , e non ci sono dei sensori, sui tavoli per mangiare, quindi il robot deve portare il cibo da tavolo numero 1 e portare o sul tavolo numero 2 o sul tavolo numero 3 , voglio mettere 4 pulsanti :1 pulsante di start, e un pulsante di stop, e un pulsante di destra e un pulsante di sinistra cosi posso comandare il robot manualmente cioè se per caso il tavolo numero 2 è occupato con pulsante destra dico a robot ke metti sul tavolo numero 3 e cosi via ,e poi ancora non so se faro tempo volevo mettere anche qualche allarme che mette a suonare mentre il robot è in funzione, per configurare di hw mi aiuta un mio collega che lavora in azienda,se mi potete aiutare per analisi del progetto quanti ingressi e uscite mi servono ela programmazione , grazie per aiuto , se qualchecosa non è chiaro ditemi perché non sono molto bravo di scrivere italiano , mi scuso tanto

0
voti
[15] Re: Come Si Può Interfacciare Un Robot Comau Con Plc Siemens 30
![]() da
da ![]() Candy » 25 ago 2011, 11:31
Candy » 25 ago 2011, 11:31
Uhm... A questo punto ho dei seri dubbi. Ne avevo già per il vero, ma ora si ingigantiscono.
Devi per forza usare anche il PLC?
Io non so che tipo di progetto tu voglia realizzare e, se anche l'uso dell'italiano è un problema, la vedo molto dura; ma, se ad esempio tu ti accontentassi, ed ammesso che il robot abbia alcuni I/O HW, che solitamente hanno, (non molti), potresti realizzare due programmi robot, uno che si occupa della parte di "motion" ed uno che si occupa della pochissima parte PLC che ti occorre. (sulle FlexPendant comau si posso personalizzare, se ricordo bene, 6 tasti touch).
In questo modo ti concentreresti unicamente sul robot, dimenticando PLC, interfacciamenti di ogni sorta e tutte le difficoltà del caso nel tener i due programmi sincronizzati. I pochi messaggi di avaria da visualizzare, li visualizzeresti sulla FlexPendant...
Vedi tu.
Devi per forza usare anche il PLC?
Io non so che tipo di progetto tu voglia realizzare e, se anche l'uso dell'italiano è un problema, la vedo molto dura; ma, se ad esempio tu ti accontentassi, ed ammesso che il robot abbia alcuni I/O HW, che solitamente hanno, (non molti), potresti realizzare due programmi robot, uno che si occupa della parte di "motion" ed uno che si occupa della pochissima parte PLC che ti occorre. (sulle FlexPendant comau si posso personalizzare, se ricordo bene, 6 tasti touch).
In questo modo ti concentreresti unicamente sul robot, dimenticando PLC, interfacciamenti di ogni sorta e tutte le difficoltà del caso nel tener i due programmi sincronizzati. I pochi messaggi di avaria da visualizzare, li visualizzeresti sulla FlexPendant...
Vedi tu.
-
Candy
32,5k 7 10 13 - CRU - Account cancellato su Richiesta utente
- Messaggi: 10123
- Iscritto il: 14 giu 2010, 22:54
0
voti
[16] Re: Come Si Può Interfacciare Un Robot Comau Con Plc Siemens 30
![]() da
da ![]() ghasem » 25 ago 2011, 12:30
ghasem » 25 ago 2011, 12:30
teoricamente volevo usare anche plc perche voglio scrivere qualchecosa sulla mia tesi , quindi sono molto confuso e non lo so nemmeno da dove devo iniziare , per intrerfaccia sono gia a posto , perché mi spiega un mio collega,solo per analisi del progetto che non lo so da dove e come devo iniziare
1
voti
[17] Re: Come Si Può Interfacciare Un Robot Comau Con Plc Siemens 30
![]() da
da ![]() Candy » 25 ago 2011, 12:59
Candy » 25 ago 2011, 12:59
Guarda che Ivan_Iamoni ti ha già dato un grandissimo suggerimento. Forse non lo sai vedere e cogliere, ma partendo da quel post, puoi sviluppare tutto il tuo progetto, (con le dovute correzioni):
- layout;
- schema elettrico;
- ciclogramma delle macro fasi;
- programmazione.
Io, per ora, vedo solo che giri attorno a questo post, forse in attesa che arrivi qualcosa dal cielo?
Ti sono state poste moltissime domande, alle quali non hai mai risposto, non hai, (da quel che si vede), mai raccolto nessun suggerimento.
Indubbiamente manca molta esperienza, e per questo ti avevo chiesto: di cosa ti sei occupato in questo stage?
Hai una vaga idea di cosa c'è dietro alla progettazione di una simile isola? O di un macchinario in genere?
Normalmente progetti simili, nella mia esperienza, li ho visti tirare su da artigiani con tanto di terza media...
- layout;
- schema elettrico;
- ciclogramma delle macro fasi;
- programmazione.
Io, per ora, vedo solo che giri attorno a questo post, forse in attesa che arrivi qualcosa dal cielo?
Ti sono state poste moltissime domande, alle quali non hai mai risposto, non hai, (da quel che si vede), mai raccolto nessun suggerimento.
Indubbiamente manca molta esperienza, e per questo ti avevo chiesto: di cosa ti sei occupato in questo stage?
Hai una vaga idea di cosa c'è dietro alla progettazione di una simile isola? O di un macchinario in genere?
Normalmente progetti simili, nella mia esperienza, li ho visti tirare su da artigiani con tanto di terza media...
-
Candy
32,5k 7 10 13 - CRU - Account cancellato su Richiesta utente
- Messaggi: 10123
- Iscritto il: 14 giu 2010, 22:54
0
voti
[18] Re: Come Si Può Interfacciare Un Robot Comau Con Plc Siemens 30
![]() da
da ![]() ghasem » 25 ago 2011, 16:38
ghasem » 25 ago 2011, 16:38
si mi è servito tanto grazie ivan, questo progtto ha deciso l'azienda e non io, quindi sinceramente in questo sto studiando di tutto pdl2 step7 , plc siemens, ecc quindi non lo so nemmeno io perché hanno deciso questo progetto , il progetto che mi ha mandato Ivan piu o meno uguale al progetto che devo fare in azienda solo dopo devo fare il circuito di protezione ed emergenza. comunque come avevo accentato non ho fatto mai nella mia una cosa pratica , quindi non sono una professionista
0
voti
[19] Re: Come Si Può Interfacciare Un Robot Comau Con Plc Siemens 30
![]() da
da ![]() Ivan_Iamoni » 26 ago 2011, 14:21
Ivan_Iamoni » 26 ago 2011, 14:21
Per prima cosa, vedo che resti sempre generico, e scarso di informazioni, al di là o meno che tu padroneggi l'Italiano, non so quale vantaggio ne tragga.
Provo a farti alcune domande, che sono essenziali, per capire come sarà il tuo progetto:
1-Il robot, come afferra i piatti?
2-Non vi sono sensori sui tavoli, per specifica esigenza di progetto o perché non li vuoi tu?
3-
Cioè devi prevedere delle barriere di sicurezza?
Hai già pensato a tutto questo, prima di pensare a sto cavolo di PROFIBUS?
Provo a farti alcune domande, che sono essenziali, per capire come sarà il tuo progetto:
1-Il robot, come afferra i piatti?
2-Non vi sono sensori sui tavoli, per specifica esigenza di progetto o perché non li vuoi tu?
3-
solo dopo devo fare il circuito di protezione ed emergenza.
Cioè devi prevedere delle barriere di sicurezza?
Hai già pensato a tutto questo, prima di pensare a sto cavolo di PROFIBUS?
-
Ivan_Iamoni
5.336 6 10 12 - Utente disattivato per decisione dell'amministrazione proprietaria del sito
- Messaggi: 2330
- Iscritto il: 22 ott 2006, 18:45
0
voti
[20] Re: Come Si Può Interfacciare Un Robot Comau Con Plc Siemens 30
![]() da
da ![]() ghasem » 30 ago 2011, 15:55
ghasem » 30 ago 2011, 15:55
Salve
se vi do poche informazioni è perché ancora non sono sicuro cosa vuole fare l'azienda che progetto vuole scegliere mi hanno solo accennato questo progetto , quindi non sono molto sicuro. per questo volevo avere alcune informazioni generali .
se vi do poche informazioni è perché ancora non sono sicuro cosa vuole fare l'azienda che progetto vuole scegliere mi hanno solo accennato questo progetto , quindi non sono molto sicuro. per questo volevo avere alcune informazioni generali .
24 messaggi
• Pagina 2 di 3 • 1, 2, 3
Torna a Automazione industriale ed azionamenti
Chi c’è in linea
Visitano il forum: Nessuno e 4 ospiti