
 Elettrotecnica e non solo (admin)
Elettrotecnica e non solo (admin) Un gatto tra gli elettroni (IsidoroKZ)
Un gatto tra gli elettroni (IsidoroKZ) Esperienza e simulazioni (g.schgor)
Esperienza e simulazioni (g.schgor) Moleskine di un idraulico (RenzoDF)
Moleskine di un idraulico (RenzoDF) Il Blog di ElectroYou (webmaster)
Il Blog di ElectroYou (webmaster) Idee microcontrollate (TardoFreak)
Idee microcontrollate (TardoFreak) PICcoli grandi PICMicro (Paolino)
PICcoli grandi PICMicro (Paolino) Il blog elettrico di carloc (carloc)
Il blog elettrico di carloc (carloc) DirtEYblooog (dirtydeeds)
DirtEYblooog (dirtydeeds) Di tutto... un po' (jordan20)
Di tutto... un po' (jordan20) AK47 (lillo)
AK47 (lillo) Esperienze elettroniche (marco438)
Esperienze elettroniche (marco438) Telecomunicazioni musicali (clavicordo)
Telecomunicazioni musicali (clavicordo) Automazione ed Elettronica (gustavo)
Automazione ed Elettronica (gustavo) Direttive per la sicurezza (ErnestoCappelletti)
Direttive per la sicurezza (ErnestoCappelletti) EYnfo dall'Alaska (mir)
EYnfo dall'Alaska (mir) Apriamo il quadro! (attilio)
Apriamo il quadro! (attilio) H7-25 (asdf)
H7-25 (asdf) Passione Elettrica (massimob)
Passione Elettrica (massimob) Elettroni a spasso (guidob)
Elettroni a spasso (guidob) Bloguerra (guerra)
Bloguerra (guerra)
Indice |
Introduzione
Ancora grazie ad un intervento di IsidoroKZ, il quale sul forum ha dato interessantissimi spunti sull'analisi del BUCK invertito in configurazione anello aperto, nasce anche questa (ultima') PARTE III in cui queste considerazioni vengono affrontate e riassunte.
L'ulteriore questione...
Dai risultati dei documenti precedenti, si è quindi compreso come, utilizzare un buck converter in modalità continua, per pilotare direttamente dei LED MA senza retroazione, è molto rischioso in quanto si ha che la corrente possa "divergere" (questo considerando LED ideali). Comunque, la corrente di uscita ha ampie variazioni in funzioni di variazioni delle grandezze di ingresso.
Abbiamo anche visto che invece, se lavorassimo in regime discontinuo, riusciamo ad essere più “stabili” alle variazioni di Vin o Vled.
Con questo termine “stabili” intendo dire che eventuali variazioni di Vin o Vled se rimaniamo sempre in funzionamento discontinuo, ho una variazione “limitata” della grandezza di uscita.
Tutto questo è stato fatto analizzando NEL TEMPO l'andamento delle forme d'onda della corrente.
Ora vorrei esporre un ragionamento alternativo di quello che è stato finora detto: LA RESISTENZA EQUIVALENTE DI USCITA DI UN BUCK CONVERTER. Partiamo dal solito buck converter.
Sappiamo, per tutta la teoria che ci sta dietro, che, lavorando in funzionamento continuo, la Vout è direttamente proporzionale al duty cicle di lavoro, secondo la legge:

Quindi anche al variare della corrente richiesta in uscita, FINCHE’ RIMANGO IN MODALITA’ continua, la Vout è sempre proporzionale al duty.
Questo concetto lo si può anche esprimere dicendo che la resistenza equivalente del buck è NULLA! Ovvero è un generatore di tensione ideale!
Attenzione: questa resistenza va messa in serie ad un generatore di tensione di valore pari alla uscita del buck converter…
Cioè, se ho un buck alimentato a 12V, al 50% di duty che fornisce una energia tale da rimanere in modalità continua, il circuito equivalente è questo:
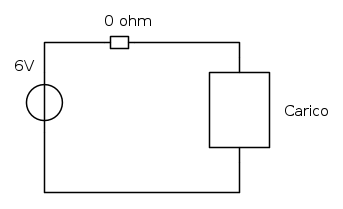
Matematicamente:
Se duty costante, finchè rimando in continuo:
 che è NULLA in quanto Vout NON dipende da Iout
che è NULLA in quanto Vout NON dipende da Iout
Questa curva, che è la “funzione di trasferimento del buck” lo dimostra:
Buck.JPG
Questo dimostra anche che pilotare un led direttamente da un buck è …. da imprudenti!!! E’ come pilotare un led con un generatore di tensione!
La corrente viene “determinata” o limitata praticamente dalla resistenza differenziale del led (pochi ohm). Una leggera variazione di Vled determina una grande variazione della corrente:
curve2.jpg
Quindi come prima soluzione potremmo, come tra l’altro già detto in precedenza, inserire una resistenza serie per limitare un po la corrente. Il rendimento peggiora, ma almeno entro certi limiti di variazione di Vin e Vled, la corrente rimane confinata.
Oppure va introdotto un feedback sulla corrente.
Sempre nel precedente documento però avevamo notato che, lavorando in modo discontinuo, il problema viene “risolto”.
Allora mi chiedo: che resistenza di uscita equivalente posso considerare per il BUCK funzionante in modalità discontinua?
Effettivamente ora una resistenza equivalente c’è (e non NULLA) perché, a duty cicle fisso, al variare del carico, la tensione cambia (vedi sempre funzione di trasferimento del BUCK funzionanete in DISCONTINUO).
Andando a considerare la trattazione del BUCK vediamo che la legge che determina Vout in funzione di Vin, in modo discontinuo è:

Questa legge ci dice, quando vale Vout in funzione di Vin al variare del Duty e dell’assorbimento di uscita. Come vedo, fissato D, più chiedo potenza (più chiedo Io) più la Vout scende ovvero esiste una resistenza di uscita non nulla.
Ora io voglio valutare proprio questa resistenza di uscita equivalente al buck in modalità discontinua, con duty fissato (che è il caso del mio esempio).
Calcolo D2

Poi calcolo la resistenza di uscita come
 e sostituisco D2costante calcolato prima.
e sostituisco D2costante calcolato prima.
Ricordando che:
Derivata(f(x))n = nf(x)n − 1f'(x)
Otteniamo:

Quindi calcolo D2 dalla legge sopra:
Rimane il fatto che la soluzione più elegante, sicura e di migliore prestazione, è aggiungere un anello per i controllo della corrente. Ma questa soluzione complica notevolmente il lavoro.
Questa soluzione si presta dove serve un basso costo, semplicità di utilizzo ma dove non è richiesta precisione nella regolazione della corrente.
Faccio notare inoltre che la corrente nel led ha una forma triangolare con picchi che possono essere anche più del doppio della nominale (dipende da Vin, Vled e numero di led).
Da qui vedo che, fintanto che sono in modalità (più o meno) DISCONTINUA, compare una resistenza equivalente di uscita del BUCK che è funzione di Vin, Vo e Iout...
Questa è una resistenza NON dissipativa!
Nel nostro caso ora la resistenza si trova ad essere in serie al LED che quindi limita la variazione di corrente in uscita (nel led) in corrispondenza di variazioni di Vin e Vled.
Cioè: io dimensiono il BUCK funzionante in modalità discontinua come citato nel documento parte II. A questo punto sul led trovo una tensione Vled calcolata, ma fornita da un generatore di tensione IDEALE con in serie una resistenza Ro.
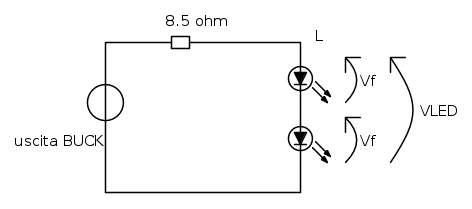
Quindi adesso, un aumento della Vin o diminnuzione di Vled comporta una variazione LIMITATA della corrente circolante.
Dalla formula si vade anche che lavorare con una Vout metà della Vin da il risultato più alto di resistenza serie equivalente.
Conclusione
Cerco di riportare qui un sunto dei tre documenti trattati.
- Il problema di partenza era quello di pilotare 2 led di potenza (Iled=350mA, Vf=3V) con una tensione disponibile di 12V.
- Lo si vuole fare tramite un circuito NON dissipativo, quindi SWITCHING.
- La configurazione più adatta è il buck, ma viene studiata la configurazione BUCK INVERTITO per poter utilizzare un NMOS (quindi pilotato rispetto a massa).
- Per semplicità del progetto si decide di lavorare ad anello aperto (quindi senza feedback della corrente in uscita e controllo del duty).
- Dall'analisi delle forme d'onda nel tempo si evince che lavorando in modalità CONTINUA, ci troviamo pilotare il led in modo rischioso nel momento in cui ci sono delle variazioni di Vin e Vled (grosse variazioni della corrente nel led, al limite infinite se led ideale).
- La modalità discontinua LIMITA le variazioni della corrente, pur NON mantenendo in regolazione la corrente nel led, e questo viene descritto nel documento utilizzando l'analisi temporale delle grandezze.
- Il tutto viene anche "spiegato" considerando quella che è la resistenza equivalente di uscita di un back che è NON DISSIPATIVA sia nel caso di modalità continua (resistenza out nulla) che nel modo discontinuo ().
Quindi:
- BUCK converter in modalità continua: ottimo generatore di tensione (ideale, con Rout praticamente nulla).
- BUCK converter in modalità discontinua: generatore di tensione NON ideale, con una resistenza serie che abbiamo calcolato, ma che NON è dissipativa!!!
Grazie ancora ad IsidoroKZ per gli stimoli e suggerimenti avuti per la stesura del documento.