
 Elettrotecnica e non solo (admin)
Elettrotecnica e non solo (admin) Un gatto tra gli elettroni (IsidoroKZ)
Un gatto tra gli elettroni (IsidoroKZ) Esperienza e simulazioni (g.schgor)
Esperienza e simulazioni (g.schgor) Moleskine di un idraulico (RenzoDF)
Moleskine di un idraulico (RenzoDF) Il Blog di ElectroYou (webmaster)
Il Blog di ElectroYou (webmaster) Idee microcontrollate (TardoFreak)
Idee microcontrollate (TardoFreak) PICcoli grandi PICMicro (Paolino)
PICcoli grandi PICMicro (Paolino) Il blog elettrico di carloc (carloc)
Il blog elettrico di carloc (carloc) DirtEYblooog (dirtydeeds)
DirtEYblooog (dirtydeeds) Di tutto... un po' (jordan20)
Di tutto... un po' (jordan20) AK47 (lillo)
AK47 (lillo) Esperienze elettroniche (marco438)
Esperienze elettroniche (marco438) Telecomunicazioni musicali (clavicordo)
Telecomunicazioni musicali (clavicordo) Automazione ed Elettronica (gustavo)
Automazione ed Elettronica (gustavo) Direttive per la sicurezza (ErnestoCappelletti)
Direttive per la sicurezza (ErnestoCappelletti) EYnfo dall'Alaska (mir)
EYnfo dall'Alaska (mir) Apriamo il quadro! (attilio)
Apriamo il quadro! (attilio) H7-25 (asdf)
H7-25 (asdf) Passione Elettrica (massimob)
Passione Elettrica (massimob) Elettroni a spasso (guidob)
Elettroni a spasso (guidob) Bloguerra (guerra)
Bloguerra (guerra)
Dopo l'articolo dedicato alle matrici, vi proponiamo stavolta una breve passeggiata tra i sistemi di equazioni lineari, i quali rivestono un ruolo centrale nell'algebra lineare.
In tutti i sistemi di equazioni lineari "sono coinvolti" scalari sia in qualità di coefficienti che di costanti che supponiamo appartenenti ad un campo generico K. Non si perde di generalità se si afferma che essi appartengono al campo dei numeri reali R.
Indice |
Definizioni
Equazione lineare
Una equazione lineare nelle incognite x1, x2,..., xn è l'equazione che può essere posta nella forma standard:

dove a1, a2, ... , an sono delle costanti. La costante ak è il coefficiente di xk.
b è detto invece termine noto dell'equazione.
Una soluzione dell'equazione lineare è un insieme di valori per ciascuna incognita o un vettore u di K, cioè:

tale che sia soddisfatta la seguente relazione, o enunciato, che segue:

In tal caso, si dice che la soluzione trovata soddisfa l'equazione.
Sistema di equazioni lineari
In maniera intuitiva potremmo dire che esso non è altro che un insieme di equazioni lineari con le stesse incognite. Nello specifico un sistema di m equazioni lineari L1, L2, ... , Lm in n incognite x1, x2, ... , xn può essere posto nella consueta forma standard :

dove aij e bi sono costanti.
aij è il coefficiente dell'incognita xj nell'equazione Li, mentre bi è la costante o termine noto dell'equazione Li.
Il sistema prima scritto a titolo di esempio è detto sistema m x n. E' detto sistema qudrato se m = n, cioè se il numero delle equazioni è uguale a quello delle incognite.
Si dice omogeneo se tutti i termini noti sono nulli, altrimenti è detto non omogeneo.
Una soluzione del sistema di equazioni lineari è un insieme di valori per ognuna delle incognite o, in maniera equivalente, un vettore u di Kn, che sia soluzione di ognuna delle equazioni che compongono il sistema. L'insieme di tutte le soluzioni è detto insieme delle soluzioni o soluzione generale del sistema.
Il sistema di equazioni lineari è detto inconsistente se non ha soluzioni, consistente se ha una o più soluzioni. Se il campo degli scalari K è infinito, come può esserlo il campo R dei numeri reali o quello dei numeri complessi C, vale il teorema che segue.
Supposto che il campo K sia infinito, allora ogni sistema di equazioni lineari:
- ha un'unica soluzione;
- non ha alcuna soluzione;
- ha infinite soluzioni.
Matrice aumentata e matrice dei coefficienti
Dato ancora una volta il sistema generico di cui sopra, si dicono rispettivamente matrice aumentata e matrice dei coefficienti le seguenti due matrici:

La matrice dei coefficienti è la matrice aumentata privata dell'ultima colonna dei termini noti o costanti. Un sistema di equazioni lineari è completamente determinato dalla sua matrice aumentata M e viceversa.
Equazione lineare degenere
Una equazione lineare si dice degenere se tutti i oefficienti sono nulli, cioè se si presenta nella forma:

La soluzione di tale equazione dipende esclusivamente dal valore di b:
- se b ≠ 0 l'equazione non ha soluzioni;
- se b = 0 ogni vettore u = (k1, k2, ... , kn) in Kn è soluzione.
Sistemi equivalenti ed operazioni elementari
Consideriamo ancora il generico sistema di equazioni lineari m x n:
Detta L l'equazione lineare ottenuta moltiplicando le m equazioni per le costanti c1, c2, ... , cn e sommando le equazioni ottenute:

Tale equazione è detta combinazione lineare delle equazioni del sistema. Ogni soluzione del sistema generico prima scritto è anche soluzione di tale combinazione lineare.
Due sistemi di equazioni lineari si dicono equivalenti se hanno le stesse soluzioni.
Dato un sistema di equazioni elementari L1, L2, ... , Lm si dicono operazioni elementari le seguenti operazioni:
- scambiare due delle equazioni ;
- sostituire un'equazione con un multiplo diverso da zero di se stessa;
- sostituire un'equazione con la somma di un multiplo di un'altra equazione e se stessa.
Vale inoltre il seguente teorema:
- se abbiamo un sistema M di equazioni lineari ottenuto da un altro sistema, chimiamolo S, grazie ad una sucessione finita di operazioni elementari, allora M ed S hanno le stesse soluzioni.
Partiamo dal basso...
Equazione lineare in un'incognita
Data l'equazione lineare ax = b, si ha:
- se a ≠ 0 allora x = b/a è l'unica soluzione dell'equazione;
- se a = 0 e b ≠ 0, allora l'equazione non ha nessuna soluzione;
- se a e b sono entrambi uguali a zero, ogni scalare k è soluzione dell'equazione.
Sistema di due equazioni lineari in due incognite
Consideriamo il sistema di due equazioni lineari non degeneri in due incognite composto dalle seguenti equazioni:

Essendo le due equazioni non degeneri, A1 e B1 non possono essere entrambi uguali a zero e lo stesso vale per A2 e B2.
Detto R il campo degli scalari, il grafico di ogni equazione è una retta in R2 e ci sono "tre tipologie" di soluzione, descrivibili geometricamente:
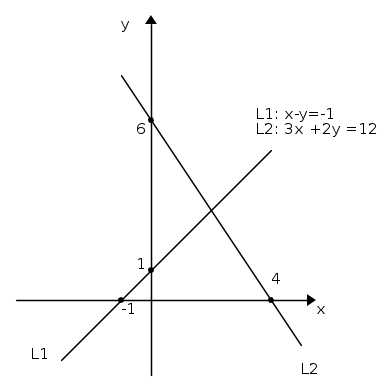
- il sistema ha una soluzione: le due rette delle due equazioni si intersecano in un punto. Ciò si verifica quando i coefficienti angolari delle due rette sono differenti tra loro:

L'esempio in figura che segue chiarisce meglio l'idea, dove le due rette hanno coefficienti angolari differenti, in particolare 1/3 ≠ -1/2.
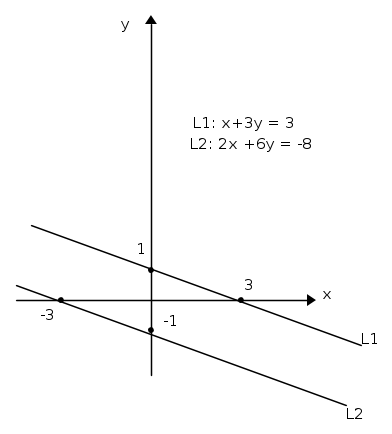
- il sistema non ha soluzioni: accade che le due rette sono parallele. Ciò si verifica quando le due rette hanno gli stessi coefficienti angolari ma è diversa l'intercetta di y, cioè quando è soddisfatta la relazione:

Si comprende meglio graficamente tale eventualità nell'esempio che segue, dove si ha 1/2 = 3/6 ≠ -3/8:
- il sistema ha infinite soluzioni: le due rette coincidono in questo caso. Ciò accade quando le rette hanno lo stesso coefficiente angolare e la stessa intercetta di y, cioè quando è soddisfatta la relazione :

Nell'esempio che segue in figura, si comprende meglio tale situazione ed in particolare risulta 1/2 = 2/4 = 4/8:

Algoritmo di eliminazione
La soluzione al sistema 2 x 2 può essere trovata grazie al procedimento cosiddetto di eliminazione attraverso il quale il sistema viene ridotto ad una sola equazione ad una incognita. Qualora la soluzione del sistema sia unica esso si divide in due parti: input: due equazioni L1 e L2 non degeneri in due incognite; il sistema ammette un'unica soluzione.
- Parte 1, detta di Eliminazione in avanti : moltiplicare ogni equazione per una costante in modo che i coefficienti di una delle due incognite (x e y) siano l'uno l'opposto dell'altro in modo tale che andando a sommare le due equazioni se ne ottiene ne una "nuova" L con una sola incognita.
- Parte 2, detta di Sostituzione all'indietro: si risolve la nuova equazione ottenuta L e si sotituisce il valore dell'unica incognita in una delle due equazioni "di partenza" in modo da trovare il valore dell'altra incognita.
La Parte 1 è applicabile sia a sistemi che ammettono un'unica soluzione sia a quelli che non ammettono un'unica soluzione. In quest'ultimo caso, l'equazione L che si ottiene è degenere e la Parte 2 non è applicabile.
Esempio
Facciamo un piccolo esempio con un sistema che ammette soluzione unica per capire meglio quanto detto finora.
Consideriamo il sistema che segue, composto dalle equazioni L1 e L2:

Scegliamo di "eliminare" ad esempio la x e quindi moltiplichiamo la prima equazione per -3 e la seconda per 1 e sommiamo algebricamente le equazioni risultanti:

otteniamo l'equazione L:

da cui y = 1 che sostituito in una delle due equazioni di partenza fornisce il valore di x = -1.
Sistemi in forma triangolare e sistemi in forma a scala
Consideriamo due tipi semplici di sistemi di equazioni lineari, quelli in forma triangolare e a scala.
Sistemi in forma triangolare
Ne è un esempio il seguente sistema:

In esso la prima incognita x1 è l'incognita principale della prima equazione. L'incognita principale della seconda equazione è x2 ed è a destra di x1 e così via .
Un sistema del genere ha un'unica soluzione ottenibile col metodo della sostituzione all'indietro. In altre parole:
- si risolve l'ultima equazione ricavando la x4;
- si sostituisce il valore trovato nella penultima equazione e si risolve trovando x3;
- si sostituiscono nella seconda equazione di tale sistema i valori trovati di x3 e x4 e si ricava x2;
- si sotituiscono nella prima equazione i valori di x3, x3 e x4 trovando poi x1.
Il vettore u=(x1,x2,x3,x4), con i valori trovati, è l'unica soluzione di tale sistema.
Sistemi in forma a scala
Un sistema come quello che segue è detto in forma a scala:

In esso nessuna equazione è degenere e l'incognita principale di ogni equazione tranne la prima è a destra della variabile principale dell'equazione precedente.
Le variabili x1, x3, x4 sono dette pivot, mentre le altre incognite x2 e x5 sono dette libere.
Consideriamo un sistema in forma a scala con r equazioni ed n incognite. Due sono i casi possibili:
- r = n: numero di equazioni e di incognite coincidono, allora il sistema ammette un'unica soluzione (esso sarà infatti un sistema in forma triangolare);
- r < n: il numero di incognite è maggiore del numero di equazioni. Possiamo assegnare alle n - r variabili libere valori arbitrari e risolvere il sistema in modo unico calcolando quelle che sono le variabili pivot, ottenendo la soluzione del sistema.
Se come nell'esempio in alto il nostro sistema avesse più incognite che equazioni e se supponessimo che il campo K a cui appartengono gli scalari fosse infinito sarebbero tali anche le soluzioni del sistema.
Ebbene, la soluzione di un sistema con variabili libere, come nel nostro caso, può essere raggiunta in due modi equivalenti tra loro: forma parametrica e forma in funzione delle variabili libere.
Forma parametrica
Tenendo sempre presente il nostro sistema in forma a scala di cui sopra, dobbiamo assegnare dei valori arbitrari, detti parametri alle variabili libere x2 e x5, ad esempio x2= a e x5= b. Utilizziamo poi il metodo della sostituzione all'indietro, che già abbiamo conosciuto ed affrontato in precedenza, per ricavare le variabili pivot in funzione di a e b.
Si ottiene:

Forma in funzione delle variabili libere
Anche qui si utilizza il metodo della sostituzione all'indietro, ma stavolta le variabili pivot si ricavano non in funzione dei parametri ma direttamente delle variabili libere x2 e x5. In altre parole, partendo dall'ultima equazione si ha che x4= 2+ 3x5. Si sostituisce tale espressione nella seconda equazione ottenendo x3 in funzione di x5 (x3= 1 - 8x5) e si sotituisce ancora nella prima equazione. Si ottiene in maniera analoga a prima:

Come si può intuire i due metodi sono praticamente identici tra loro e la scelta nell'applicare l'uno piuttosto che l'altro è puramente di carattere estetico/formale.
Metodo di eliminazione di Gauss
Il metodo principe per risolvere il generico sistema di equazioni lineari in forma generale, cioè per come l'abbiamo presentato in principio di articolo, resta quello di eliminazione di Gauss. E' composto di due parti:
- Parte 1: riduzione passo dopo passo del sistema in modo da avere una equazione degenere senza soluzioni o un sistema in forma triangolare o a scala;
- Parte 2: sostituzione all'indietro passo dopo passo fino ad avere la soluzione del sistema nella forma più semplice
Come si può intuire la Parte 2 è la seconda parte dell'algoritmo per eliminazione di cui abbiamo già parlato prima.
Riportiamo quindi la spiegazione della Parte 1 di tale metodo
Algoritmo per la Parte 1
INPUT: Abbiamo un sistema di equazioni lineari m x n:
PASSO DI ELIMINAZIONE: Si trova la prima incognita del sistema con coefficiente non nullo (secondo le notazioni adottate sinora deve essere x1):
- supponiamo appunto che sia a11 ≠ 0. Quindi se dovesse essere necessario si procede con lo scambio delle equazioni di modo che x1 appaia nella prima equazione;
- usiamo a11 come coefficiente pivot per eliminare la x1 da tutte le altre equazioni tranne la prima. In parole più brevi, per i >1:
- porre m= -ai1/a11
- sostituire Li con mLi + Li.
Il sistema assumerà la seguente forma:

dove x1 non appare solo nella prima equazione, a11 ≠ 0 e xj2 è la prima incognita con coefficiente non nullo in una qualunque delle altre equazioni, fuorchè la prima.
- Poi occorre esaminare ogni nuova equazione L. In particolare se :
- L ha la forma 0x1 + 0x2 + ... + 0xn=b con b non nullo , allora NON BISOGNA CONTINUARE, in quanto il sistema è incosistente e non ha soluzioni;
- L ha forma 0x1 + 0x2 + ... + 0xn=0 o se L è multiplo di un'altra equazione, dobbiamo cancellarla dal sistema.
PASSO RICORSIVO: si ripete ancora il PASSO DI ELIMINAZIONE ad ogni sitema più piccolo formato da tutte le equazioni tranne la prima.
OUTPUT: il sistema risulta infine ridotto alla forma triangolare o in forma a scala o ancora in un'equazione degenere che indica che il sistema è inconsistente.
Facciamo qualche piccola specificazione: il numero m prima citato è detto moltiplicatore.
Esempio di applicazione del metodo di eliminazione di Gauss per la risoluzione di un sistema di equazioni lineari
Abbiamo un sistema le cui 3 equazioni sono:

Proseguiamo rispettando le parti dell'algoritmo prima esposto.
Parte 1.
Usiamo il coefficiente 1 di x nella prima equazione L1 come coefficiente pivot per eliminare la x dall'equazione L2 e dalla L3. Si procede in tal modo:
- moltiplichiamo L1 per m=-2 e sommiamola a L2, cioè sostituiamo L2 con -2L1+L2;
- moltiplichiamo L1 per m=3 e sommiamola a L3, cioè sostituiamo L3 con 3L1 + L3.
Si giunge così a:
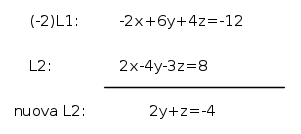
e a:
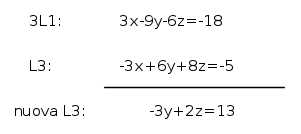
Si giunge ad un nuovo sistema le cui 3 equazioni saranno:



Usiamo ora come coefficiente pivot il coefficiente 2 dell'incognita y nella seconda nuova equazione L2 di cui sopra per eliminare la y dalla terza equazione nuova L3. Si procede come segue:
moltiplichiamo L2 per m= 3/2 e poi la sommiamo a L3, cioè sostituiamo L3 con 3/2L2 + L3.
Si giunge così a:
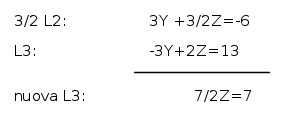
In definitiva il sistema sarà così composto:

Come si può notare, il sistema è in forma triangolare. Dunque la Parte 1 è terminata.
Parte 2.
I valori delle tre incognite sono ottenuti tramite il metodo già noto della sostituzione all'indietro. Otterremo quindi prima la z, poi la y ed infine la x. Nello spcifico:
- risolviamo L3 ricavando il valore di z = 2;
- sostituiamo z = 2 nella L2 e risolviamo tale equazione rispetto alla y ottenendo y = -3;
- sostituiamo in L1 i valori di y e z precedentemente trovati e risolviamo rispetto all'unica incognita x, ricavando x = 1.
Concludendo, la soluzione del sistema triangolare, e quindi del sistema originario di partenza, sarà:

Matrici a scala, forma canonica per righe, equivalenza per righe
Un altra procedura per la risoluzione di un sistema di equazioni lineari consiste nell'operare non col sistema stesso, bensì con la sua matrice aumentata M. Presentiamo a tal fine i concetti ad esso propedeutici.
Matrici a scala
Una matrice A si dice a scala quando sono soddisfatte le seguenti due condizioni:
- qualora fossero presenti righe zero queste devono essere in fondo alla matrice;
- ogni elemento iniziale non nullo si trova a destra dell'elemento iniziale non nullo della riga precedente.
Come sempre un esempio chiarisce più di mille parole.
La matrice seguente è una matrice a scala in cui sono stati messi in evidenza (viola) i suoi pivot:

Come si può vedere l'unica riga zero della matrice è in fondo ad essa e in ogni riga il primo elemento iniziale non nullo si trova sempre a destra del primo elemento iniziale non nullo della riga che lo precede.
Forma canonica per righe
Una matrice a scala si dice in forma canonica per righe se soddisfa le due proprietà citate prima per una matrice a scala e se soddisfa anche le seguenti due proprietà:
- ogni pivot (cioè l'elemento iniziale) non nullo è pari a 1;
- ogni pivot non nullo è l'unico elemento non nullo della colonna.
Esempi "particolari" di matrice in forma canonica per righe sono la matrice zero 0 e la matrice identità I. Un esempio pratico di matrice a scala in forma canonica per righe è rappresentato dalla seguente matrice:

Operazioni elementari per riga
Data una matrice A con righe R1, R2, .... , Rm, definiamo le operazioni su A che sono dette operazioni elementari per riga. Esse sono le seguenti:
- E1 - SCAMBIARE LE RIGHE: scambiare le righe Ri e Rj;
- E2 - RISCALARE LE RIGHE: sostituire una riga Ri con un multiplo di se stessa kRi;
- E3 - SOMMARE LE RIGHE: sostituire una riga Rj con la somma di un multiplo kRi di una riga Ri e della riga stessa Rj.
Da notare che spesso nella pratica degli esercizi i passi E2 e E3 vengono accorpati nell'unico passo E:
E: sostituire la riga Rj con la somma di un multiplo kRi di una riga Ri e un multiplo diverso da zero k'Rj della riga stessa Rj.
Equivalenza per righe e rango di una matrice
Date due matrici A e B, si dice che A è equivalente per righe a B e si scrive come A ~ B quando è possibile ricavare B da A grazie ad una sequenza finita di operazioni elementari per riga, che abbiamo descritto sopra.
Si dice invece rango di una matrice A e si scrive rank(A) il numero di elementi pivot della matrice in forma a scala di A.
Forma matriciale dell'eliminazione di Gauss
Sono due gli algoritmi in forma matriciale:
- ALGORITMO 1: trasforma la matrice A in forma a scala;
- ALGORITMO 2: trasforma la matrice in forma a scala nella sua forma canonica per righe.
Riportiamo di seguito la descrizione degli algoritmi che in realtà sono una riapplicazione alle matrici di quanto scritto per i sistemi di equazioni lineari.
ALGORITMO 1.
INPUT: Matrice A (l'OUTPUT sarà la matrice in forma a scala di A)
PASSO 1: Troviamo la prima colonna con elementi diversi da zero e la chimiamo j1. Poi:
- operiamo in modo che a1j1 ≠ 0, cioè facciamo in modo che un elemento diverso da zero compaia nella prima riga alla colonna j1;
- usiamo a1j1 come elemento pivot per ottenere zero al di sotto di a1j1, in particolare per i > 1:
PASSO 2: Si ripete il PASSO 1 alla sottomatrice formata da tutte le righe eccetto la prima. Inmaniera analoga a quanto fatto prima chimiamo j2 la prima colonna della sottomostrcie con un elemento diverso da zero. Avremo così che alla fine di questo passo a2j2 ≠ 0-
PASSO 3 FINO A r: Si continua tale processo fino a quando la sottomatrice ha solo righe con zeri. Avremo che alla fine di questo algoritmo gli elementi pivot saranno:
Da notare che:
- r è il numero di righe diverse da zero nella forma finale a scala;
- m è il moltiplicatore, già precedentemente incontrato, pari a : m = - aij1a1j1.
ALGORITMO 2.
INPUT: Matrice A nella forma a scala (l'OUTPUT sarà la matrice A nella forma canonica per righe)
PASSO 1:
- Riscalare la riga in modo che l'ultimo elemento pivot sia uguale a 1; moltiplicare l'ultima riga diversa da zero Rr per 1/arjr;
- Utilizzare arjr=1 in modo da ottenere zero sopra l'elemento pivot; per i= r - 1, r - 2, ... , 2, 1 bisogna
PASSO 2 FINO A r -1: In sostanza si ripete il PASSO 1 per le righe Rr-1, Rr-2, ... , R2.
PASSO r: Bisogna riscalare la riga in modo che il primo elemento pivot sia 1, moltiplicare quidni R1 per 1/a1j1.
Esempio di applicazione della forma matriciale dell'eliminazione di Gauss
Per capire meglio, un esempio non guasta.
Abbiamo la matrice A:

Vediamo come applicare gli algoritmi prima descritti a tale matrice.
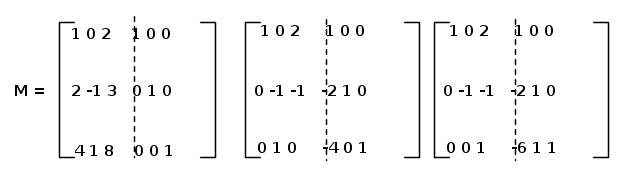
Applicazione dell'ALGORITMO 1
Utilizziamo a11=1 come pivot per avere zero al di sotto di a11. Applichiamo le seguenti operazioni:
- sostituiamo R2 con -2R1 + R2
- sostituiamo R3 con -3R1 + R3.
Utilizziamo a23 = 2 come pivot per ottenere zero sotto a23. Applichiamo le seguenti operazioni:
- sostituiamo R3 con (-3/2)R2 + R3.
Si ottiene:

Otteniamo l'output prefissato, cioè la matrice in forma a scala.
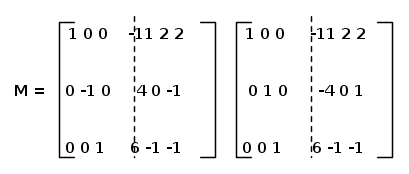
Applicazione dell'ALGORITMO 2
Si moltiplica R3 per -1/2 al fine di avere l'elemento pivot a35=1 e usiamo quest'ultimo come pivot per avere zero al di sopra di esso. Applichiamo le operazioni:
- sostituiamo R2 con -5R3 + R2;
- sostituiamo R1 con -2R3 + R1.
Si ottiene:

Poi ancora: moltiplichiamo R2 per 1/2 in modo da avere l'elemento pivot a23=1 e da poterlo utilizzare come pivot per ottenere zero al di sopra di esso. Applichiamo la seguenti operazioni: sostituiamo R1 con 3R2 + R1.
Si ottiene:

Questa è la fomra canonica per righe di A.
Un'applicazione ai sistemi di equazioni lineari
Risolviamo il seguente sistema:

Scriviamo la matrice aumentata M:

Successivamente la riduciamoin forma a scala e poi in forma canonica :


La soluzione del sistema è u= (2, -1, 3).
Inversa di una matrice n x n
L'algoritmo che segue mostra come calcoalre l'inversa di una matrice n x n:
PASSO 1: Formiamo la matrice a blocchi n x 2n M = [A,I]: A nella metà di sinistra e I in quella di destra.
PASSO 2: Si riduce M in forma a scala. Se durante il procedimento si viene a creare nella metà con A una riga zero, allora
(A non è invertibile). Altrimenti tale metà assume forma triangolare.
PASSSO 3: Si riduce M in forma canonica per righe ottenendo: M ~ [I,B], dove la matrice identita I sostituisce la matrice A e la matrice B è l'inversa di A.
PASSO 4: Porre A-1 = B.
Esempio
Facciamo un piccolo esempio per capire meglio.
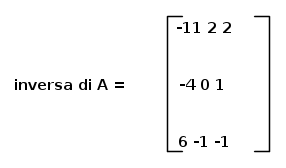
Troviamo l'inversa della seguente matrice:

Formiamo la matrice a blocchi M=[A,I] e riduciamo in forma a scala M:
La metà di sinistra di M è in forma tiangolare ed A è invertibile. Riduciamo fino alla forma canonica per righe:
Otteniamo che la inversa A-1 è:
Bibliografia
"Algebra lineare" - Lipschutz, Lipson.
