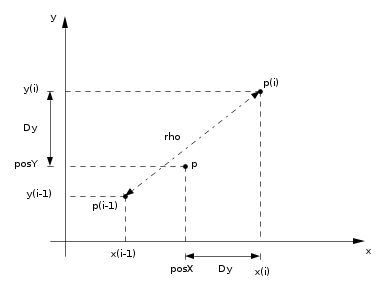
Rieccomi, dunque abbiamo parlato un po' col prof e abbiamo tirato fuori un algoritmo per inseguire i punti. Considerando questa situazione:
si ha che p(i-1) e p(i) sono due punti consecutivi contenuti in un vettore di punti da inseguire, p è la posizione attuale che non fa parte di questo vettore di punti, le coordinate posx e posy sono calcolate integrando le velocità lette dal drone, considerando che le letture arrivano con frequenza

:
 = 0")
 = 0")
 = posx(t-1) + \frac{1}{f} v_x(t)")
 = posy(t-1) + \frac{1}{f} v_y(t)")

e

sono le velocità lette dal drone non quelle impostate da noi.
Istante per istante calcoliamo la differenza tra la coordinata attuale e quella desiderata cacendo:
 - posx(t)")
 - posy(t)")
so che sto facendo un po' di confusione, con l'indice i intendo l'elemento dei vettori di punti x e y da inseguire nello spazio operativo, con t intendo la posizione istantanea del drone.
Ora sia

la distanza tra due punti consecutivi da raggiungere,

la velocità massima raggiungibile dal drone in entrambe le direzioni, possiamo variare la velocità da 0 a 1 ma impostiamo quella massima a 0.7 per evitare accelerazioni eccessive (lo destabilizzano tantissimo).
Usiamo queste informazioni per devinire le velocità in

e

del drone.


in questo modo la velocità x è massima all'inizio e cala man mano che ci si avvicina al punto, la velocità y varia allo stesso modo.
Ci sono un po di aggiustamenti dovuti ai segni delle posizioni ma il succo è questo, che dite?
Consideriamo raggiunto il punto se posx e posy si trovano all'interno di un cerchio di raggio r che sarà la nostra precisione.
Atlant.
Behind every great man is a woman rolling her eyes.

 Elettrotecnica e non solo (admin)
Elettrotecnica e non solo (admin) Un gatto tra gli elettroni (IsidoroKZ)
Un gatto tra gli elettroni (IsidoroKZ) Esperienza e simulazioni (g.schgor)
Esperienza e simulazioni (g.schgor) Moleskine di un idraulico (RenzoDF)
Moleskine di un idraulico (RenzoDF) Il Blog di ElectroYou (webmaster)
Il Blog di ElectroYou (webmaster) Idee microcontrollate (TardoFreak)
Idee microcontrollate (TardoFreak) PICcoli grandi PICMicro (Paolino)
PICcoli grandi PICMicro (Paolino) Il blog elettrico di carloc (carloc)
Il blog elettrico di carloc (carloc) DirtEYblooog (dirtydeeds)
DirtEYblooog (dirtydeeds) Di tutto... un po' (jordan20)
Di tutto... un po' (jordan20) AK47 (lillo)
AK47 (lillo) Esperienze elettroniche (marco438)
Esperienze elettroniche (marco438) Telecomunicazioni musicali (clavicordo)
Telecomunicazioni musicali (clavicordo) Automazione ed Elettronica (gustavo)
Automazione ed Elettronica (gustavo) Direttive per la sicurezza (ErnestoCappelletti)
Direttive per la sicurezza (ErnestoCappelletti) EYnfo dall'Alaska (mir)
EYnfo dall'Alaska (mir) Apriamo il quadro! (attilio)
Apriamo il quadro! (attilio) H7-25 (asdf)
H7-25 (asdf) Passione Elettrica (massimob)
Passione Elettrica (massimob) Elettroni a spasso (guidob)
Elettroni a spasso (guidob) Bloguerra (guerra)
Bloguerra (guerra)






 = 2")
 = 10")
 = 2")
 = 5")