No klejdi , mi dispiace ma così non funziona , avresti la commutazione dello scambio la prima volta ma poi ,tutti gli attraversamenti successivi del carrello C sulla posizione S1 , non varierebbero più lo stato dell'uscita o10.00.
Se ho ben capito tu devi fare eseguire una traiettoria ad 8 perpetua al carrello , quindi credo che la valvola collegata all'uscita o0.00 sia una monostabile che assume solo due posizioni in corrispondenza dello stato uscita 1 o 0 .
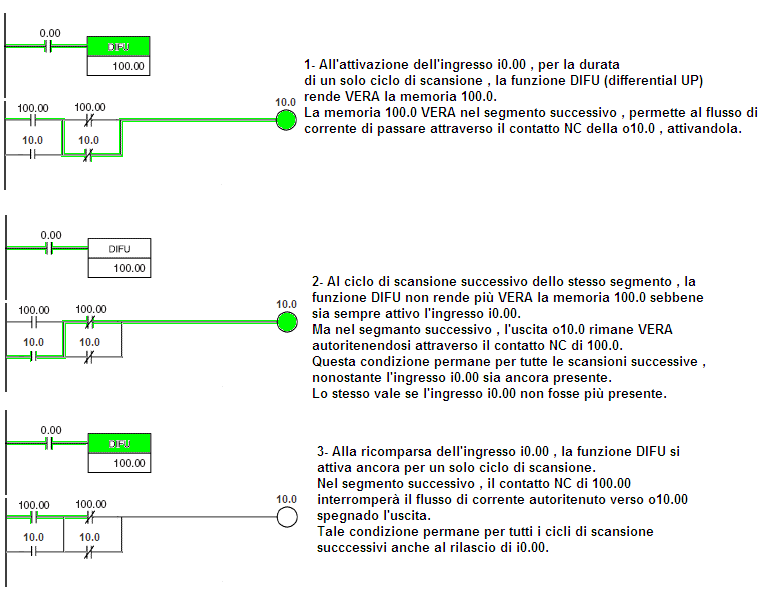
Quindi devi adottare lo stratagemma del fronte di salita ingresso S1 e un ciclo bistabile dell'uscita o10.00 , bastano due segmenti ed una funzione DIFU , spero tu la conosca.
In caso contrario ecco una spiegazione rapida , DIFU vuole dire differential UP , la variabile in ingresso al BOX DIFU , nel nostro caso specifico l'ingresso di S1 , alla sua variazione positiva ( da 0 ad 1 ) viene letta dalla funzione , ed attivata una memoria interna , liberamente assegnabile , che assume lo stato 1 ( VERO) per la durata di un solo ciclo di scansione dell'intero programma.
Quando il puntatore programma ha fatto un giro e ritorna su DIFU , sebbene la variabile in ingresso sia ancora ad 1 , imposta la memoria interna arbitrariamente a 0 (false).
Sia chiaro che questo è una soluzione ad un problema logico che non è squisitamente per PLC Omron , ma per tutti i PLC ed altro dispositivo a logica programmabile , per cui cambierebbe solo la sintassi degli operandi.
Questo esempio che ti ho disegnato dovrebbe fare al caso tuo.
Nel disegno ho aggiunto dei commenti che ti aiutano ad interpretare la funzione.
- Stop_and_GO.PNG (37.17 KiB) Visto 3075 volte
Spero ti sia chiaro che i segmenti sono solo due , e i tre casi si riferiscono alle tre distinte situazioni.
1-Arrivo del segnale S1 , prima scansione ed attivazione dell'uscita con commutazione scambio.
2-Permanenza del segnale S1 ( il carrello impiega un poco ad attraversare) poi si suppone S1 diventi 0 a carrello passato.
3-Ripassa il carrello su S1 , si disattiva l'uscita e commuta lo scambio.

 Elettrotecnica e non solo (admin)
Elettrotecnica e non solo (admin) Un gatto tra gli elettroni (IsidoroKZ)
Un gatto tra gli elettroni (IsidoroKZ) Esperienza e simulazioni (g.schgor)
Esperienza e simulazioni (g.schgor) Moleskine di un idraulico (RenzoDF)
Moleskine di un idraulico (RenzoDF) Il Blog di ElectroYou (webmaster)
Il Blog di ElectroYou (webmaster) Idee microcontrollate (TardoFreak)
Idee microcontrollate (TardoFreak) PICcoli grandi PICMicro (Paolino)
PICcoli grandi PICMicro (Paolino) Il blog elettrico di carloc (carloc)
Il blog elettrico di carloc (carloc) DirtEYblooog (dirtydeeds)
DirtEYblooog (dirtydeeds) Di tutto... un po' (jordan20)
Di tutto... un po' (jordan20) AK47 (lillo)
AK47 (lillo) Esperienze elettroniche (marco438)
Esperienze elettroniche (marco438) Telecomunicazioni musicali (clavicordo)
Telecomunicazioni musicali (clavicordo) Automazione ed Elettronica (gustavo)
Automazione ed Elettronica (gustavo) Direttive per la sicurezza (ErnestoCappelletti)
Direttive per la sicurezza (ErnestoCappelletti) EYnfo dall'Alaska (mir)
EYnfo dall'Alaska (mir) Apriamo il quadro! (attilio)
Apriamo il quadro! (attilio) H7-25 (asdf)
H7-25 (asdf) Passione Elettrica (massimob)
Passione Elettrica (massimob) Elettroni a spasso (guidob)
Elettroni a spasso (guidob) Bloguerra (guerra)
Bloguerra (guerra)



