Faccio alcuni commenti al testo nell'immagine del post [1].
Come al solito si tenta di spremere "sangue dalle arance" non impiegando gli strumenti in modo adeguato.
La frase "Assuming that the
d has not dynamics" oltre che essere sbagliata dal punto di vista del modello e' anche falsa dal punto di vista della rappresentazione.
Scrivere

vuol dire che

ma siccome il modello e' di tipo stocastico si ha :

Dove

e' una variabile aleatoria che indica il fatto importantissimo che c'e' un errore di modello per cui
 non e' una costante ma e' una costante a parte un errore
non e' una costante ma e' una costante a parte un errore.
E' questo che permette allo stimatore di far variare la costante e modificare il valore di
il quale rimane inchiodato per definizione al valore iniziale se fisso

.
Se voglio far muovere piu' velocemente

dovrei aumentare il valore dell'incertezza ovvero la varianza di
per rendere l'inseguimento della variabile di stato piu' veloce.
Questa tecnica pero' sovrappone molto rumore alla stima perche' non c'e' nessuna specifica sulla banda della variabile di stato
per cui il rumore puo' eccitarne tutto lo spettro senza limitazioni.
Questo e' sbagliato.Nell'osservatore di
Kalman la conoscenza a priori e' fondamentale.
Cosa sai del processo "vento" a priori ?
Puoi simulare il processo "vento" in modo sensato ?
Puoi almeno ipotizzare che la banda della velocita' sia limitata ?
Direi di si.
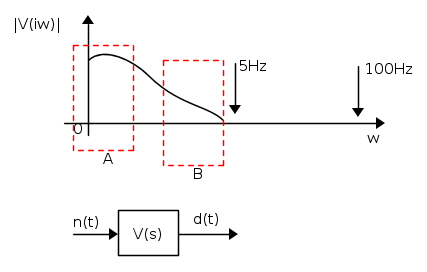
Se per esempio modelli il processo aleatorio in frequenza come indicato in figura puoi supporre il
processo aleatorio
")
come l'uscita di un filtro alimentato con rumore bianco gaussiano
")
.
A questo punto hai due sezioni
[A] e
[B] che potrebbero rappresentare la brezza lentamente variabile e le raffiche di vento ad alta frequenza.
Tutto cio' che non rientra in questa banda non ha a che fare con il modello del processo per cui non viene stimato in quanto fa parte dell'errore.
Se per esempio compare una oscillazione del rotore a 100
Hz, risultando fuori banda viene eliminata dalla stima di
in quanto il vento non puo' fisicamente avere frequenze di quell'ordine di grandezza per cui appartengono ad un altro disturbo.
Le frequenze sono puramente indicative come l'andamento spettrale del segnale.
Per fare un lavoro significativo dal punto di vista scientifico bisognerebbe campionare l'andamento del vento per un lungo periodo con diverse condizioni atmosferiche e ricavare la densita' spettrale del processo.
Fondamentalmente bisogna ipotizzare o ricavare la dinamica del modello
")
, la si deve inserire nel modello generale e poi si stima
aggiungendo la variabile di stato
che non risulta piu' una costante ma un processo aleatorio con caratteristiche ben delineate e quindi piu' fedelmente stimabile in virtu' della
conoscenza a priori.
Ipotizzare a priori che il vento sia una "costante ma non proprio" come indicato nel documento iniziale comporta stime molto lente con valori di
piccoli e stime estremamente rumorose ed errate per
di valore elevato.

 Elettrotecnica e non solo (admin)
Elettrotecnica e non solo (admin) Un gatto tra gli elettroni (IsidoroKZ)
Un gatto tra gli elettroni (IsidoroKZ) Esperienza e simulazioni (g.schgor)
Esperienza e simulazioni (g.schgor) Moleskine di un idraulico (RenzoDF)
Moleskine di un idraulico (RenzoDF) Il Blog di ElectroYou (webmaster)
Il Blog di ElectroYou (webmaster) Idee microcontrollate (TardoFreak)
Idee microcontrollate (TardoFreak) PICcoli grandi PICMicro (Paolino)
PICcoli grandi PICMicro (Paolino) Il blog elettrico di carloc (carloc)
Il blog elettrico di carloc (carloc) DirtEYblooog (dirtydeeds)
DirtEYblooog (dirtydeeds) Di tutto... un po' (jordan20)
Di tutto... un po' (jordan20) AK47 (lillo)
AK47 (lillo) Esperienze elettroniche (marco438)
Esperienze elettroniche (marco438) Telecomunicazioni musicali (clavicordo)
Telecomunicazioni musicali (clavicordo) Automazione ed Elettronica (gustavo)
Automazione ed Elettronica (gustavo) Direttive per la sicurezza (ErnestoCappelletti)
Direttive per la sicurezza (ErnestoCappelletti) EYnfo dall'Alaska (mir)
EYnfo dall'Alaska (mir) Apriamo il quadro! (attilio)
Apriamo il quadro! (attilio) H7-25 (asdf)
H7-25 (asdf) Passione Elettrica (massimob)
Passione Elettrica (massimob) Elettroni a spasso (guidob)
Elettroni a spasso (guidob) Bloguerra (guerra)
Bloguerra (guerra)






*(Fu/m)-wind;")
*(Fu/m)-wind;")

") ed il processo
ed il processo ") siano generati da rumori bianchi statisticamente indipendenti tra loro.
siano generati da rumori bianchi statisticamente indipendenti tra loro. e
e  .
. uniformemente distribuita nell'intervallo
uniformemente distribuita nell'intervallo ") .
.") e
e ") .
.