
 Elettrotecnica e non solo (admin)
Elettrotecnica e non solo (admin) Un gatto tra gli elettroni (IsidoroKZ)
Un gatto tra gli elettroni (IsidoroKZ) Esperienza e simulazioni (g.schgor)
Esperienza e simulazioni (g.schgor) Moleskine di un idraulico (RenzoDF)
Moleskine di un idraulico (RenzoDF) Il Blog di ElectroYou (webmaster)
Il Blog di ElectroYou (webmaster) Idee microcontrollate (TardoFreak)
Idee microcontrollate (TardoFreak) PICcoli grandi PICMicro (Paolino)
PICcoli grandi PICMicro (Paolino) Il blog elettrico di carloc (carloc)
Il blog elettrico di carloc (carloc) DirtEYblooog (dirtydeeds)
DirtEYblooog (dirtydeeds) Di tutto... un po' (jordan20)
Di tutto... un po' (jordan20) AK47 (lillo)
AK47 (lillo) Esperienze elettroniche (marco438)
Esperienze elettroniche (marco438) Telecomunicazioni musicali (clavicordo)
Telecomunicazioni musicali (clavicordo) Automazione ed Elettronica (gustavo)
Automazione ed Elettronica (gustavo) Direttive per la sicurezza (ErnestoCappelletti)
Direttive per la sicurezza (ErnestoCappelletti) EYnfo dall'Alaska (mir)
EYnfo dall'Alaska (mir) Apriamo il quadro! (attilio)
Apriamo il quadro! (attilio) H7-25 (asdf)
H7-25 (asdf) Passione Elettrica (massimob)
Passione Elettrica (massimob) Elettroni a spasso (guidob)
Elettroni a spasso (guidob) Bloguerra (guerra)
Bloguerra (guerra)chiarimento valori PID
Moderatori: ![]() dimaios,
dimaios, ![]() carlomariamanenti
carlomariamanenti
23 messaggi
• Pagina 2 di 3 • 1, 2, 3


0
voti
[12] Re: chiarimento valori PID
![]() da
da ![]() dimaios » 9 lug 2015, 11:30
dimaios » 9 lug 2015, 11:30
Puoi fare delle semplici simulazioni Matlab oppure con Octave che è open source. Ancora più intuitivo con Simulink oppure con Scilab.
Ingegneria : alternativa intelligente alla droga.
-

 dimaios
dimaios
30,2k 7 10 12 - G.Master EY

- Messaggi: 3381
- Iscritto il: 24 ago 2010, 14:12
- Località: Behind the scenes
0
voti
[13] Re: chiarimento valori PID
![]() da
da ![]() marc96 » 9 lug 2015, 13:42
marc96 » 9 lug 2015, 13:42
Mi permetto di riprendere in altri termini l'esempio molto significativo di IsidoroKZ.
Immagina l'attracco di una barca (siamo in estate!); il regolatore elabora l'errore, differenza tra il set-point e il segnale di reazione, che nel caso in esame è la distanza tra la barca e la banchina.
All'inizio l'errore è grande e con esso anche l'intervento dell'azione proporzionale; al ridursi della distanza l'azione proporzionale diventa sempre più piccola, ma è sempre presente e a causa dell'inerzia la barca urterebbe la banchina.
Se agisce anche l'azione derivativa, al diminuire della distanza e quindi con derivata negativa, si ha un'azione che si oppone a quella proporzionale (indietro tutta!) e può evitare parecchi danni (non è consigliabile la sovraelongazione).
Propongo comunque di andare tutti al mare!!!!
Immagina l'attracco di una barca (siamo in estate!); il regolatore elabora l'errore, differenza tra il set-point e il segnale di reazione, che nel caso in esame è la distanza tra la barca e la banchina.
All'inizio l'errore è grande e con esso anche l'intervento dell'azione proporzionale; al ridursi della distanza l'azione proporzionale diventa sempre più piccola, ma è sempre presente e a causa dell'inerzia la barca urterebbe la banchina.
Se agisce anche l'azione derivativa, al diminuire della distanza e quindi con derivata negativa, si ha un'azione che si oppone a quella proporzionale (indietro tutta!) e può evitare parecchi danni (non è consigliabile la sovraelongazione).
Propongo comunque di andare tutti al mare!!!!

2
voti
[14] Re: chiarimento valori PID
![]() da
da ![]() dimaios » 9 lug 2015, 14:02
dimaios » 9 lug 2015, 14:02
EcoTan ha scritto:Cosa è feed forward? in questo momento mi sfugge
Per avere un'idea. link.
Nei robot il modello è molto aderente alla realtà per cui il feed forward funziona bene, anzi diventa indispensabile per vari motivi.
Ingegneria : alternativa intelligente alla droga.
-
dimaios
30,2k 7 10 12 - G.Master EY
- Messaggi: 3381
- Iscritto il: 24 ago 2010, 14:12
- Località: Behind the scenes
2
voti
[15] Re: chiarimento valori PID
![]() da
da ![]() dimaios » 9 lug 2015, 14:23
dimaios » 9 lug 2015, 14:23
Volevo solo sottolineare due aspetti.
1. A volte invece del controllo feed forward conviene utilizzare quello predittivo ( impiegato soprattutto nei processi chimici ).
La scelta si fonda sulla natura della funzione di trasferimento da trattare e la bontà del modello a disposizione.
Il feedback risulta comunque un "must" per via della parte stocastica del processo.
2. Talvolta l'inefficacia del controllo non dipende tanto dalla modellazione del processo nominale ma dalle variazioni parametriche dello stesso.
Nella realtà fisica si controlla sempre un insieme di processi che possono essere anche piuttosto "distanti" l'uno dall'altro.
In questi casi ( praticamente sempre ) bisogna ricorrere alle tecniche di controllo robusto altrimenti si incorre nel solito contenzioso tra performance e stabilità.
1. A volte invece del controllo feed forward conviene utilizzare quello predittivo ( impiegato soprattutto nei processi chimici ).
La scelta si fonda sulla natura della funzione di trasferimento da trattare e la bontà del modello a disposizione.
Il feedback risulta comunque un "must" per via della parte stocastica del processo.
2. Talvolta l'inefficacia del controllo non dipende tanto dalla modellazione del processo nominale ma dalle variazioni parametriche dello stesso.
Nella realtà fisica si controlla sempre un insieme di processi che possono essere anche piuttosto "distanti" l'uno dall'altro.
In questi casi ( praticamente sempre ) bisogna ricorrere alle tecniche di controllo robusto altrimenti si incorre nel solito contenzioso tra performance e stabilità.
Ingegneria : alternativa intelligente alla droga.
-
dimaios
30,2k 7 10 12 - G.Master EY
- Messaggi: 3381
- Iscritto il: 24 ago 2010, 14:12
- Località: Behind the scenes

0
voti
[17] Re: chiarimento valori PID
![]() da
da ![]() Gustav » 9 lug 2015, 18:31
Gustav » 9 lug 2015, 18:31
dimaios ha scritto:Gustav ha scritto:Non ho esperienza di sistemi che utilizzino regolatori di tipo PD, vedo che nel maggiorana dei casi il regolatore più utile è il PI e sue varianti.
In robotica vivi praticamente con pane PD e feed forward.
Non ho la tua conoscenza in questo settore e mi fido di cosa scrivi. Personalmente poi, nei processi che mi trovo a regolare, mi trovo meglio applicando dei filtri sul segnale di feedback prima di passare il dato al regolatore PI, con quindi una involontaria azione derivativa conseguente, data dallo stadio di filtro. Il termine D ha certamente piu senso quando nel processo il feedback e veloce, non soggetto a rallentamenti di propagazione dell'azione.
Pero esco dal mio campo di competenza.
6
voti
[18] Re: chiarimento valori PID
![]() da
da ![]() dimaios » 9 lug 2015, 21:40
dimaios » 9 lug 2015, 21:40
Gustav ha scritto:18.2 Spiegazione in italiano?
Non capisco il dubbio. Il controllo robusto è una parte della teoria che si occupa di risolvere non solo il controllo del processo nominale
") ma anche di tutti i processi che "distano" da quest'ultimo di una quantità pari a
ma anche di tutti i processi che "distano" da quest'ultimo di una quantità pari a ") .
.Il processo reale è quindi uno qualsiasi di quelli descrivibili tramite l'equazione :
 = P_n(s) + \Delta P(s)")
Per esempio in un circuito elettronico analogico potresti considerare come processo nominale la funzione di trasferimento con i componenti nominali e come
") l'insieme di tutti i circuiti con tutte le possibili variazioni parametriche dei componenti elettronici.
l'insieme di tutti i circuiti con tutte le possibili variazioni parametriche dei componenti elettronici.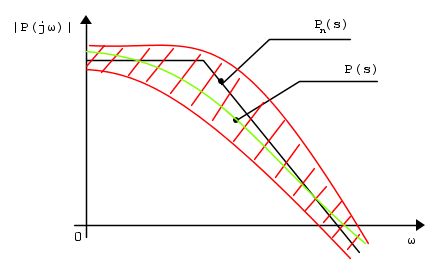
La funzione di trasferimento di un circuito possibile è quindi compresa tra un minimo ed un massimo in frequenza come indicato in figura.
Ciò significa che la generica
è una qualsiasi curva all'interno dell'area tratteggiata.Compito del controllore sintetizzato tramite le tecniche del controllo robusto è quello di regolare qualsiasi processo in quella fascia garantendo la stabilità e le performance espresse in termini di specifiche.
Al contrario del controllo classico ove si prende in considerazione solamente il processo nominale in questo caso si devono considerare tutti i processi che "distano" da quello nominale all'interno di una determinata fascia definita in frequenza.
Ingegneria : alternativa intelligente alla droga.
-
dimaios
30,2k 7 10 12 - G.Master EY
- Messaggi: 3381
- Iscritto il: 24 ago 2010, 14:12
- Località: Behind the scenes
7
voti
[19] Re: chiarimento valori PID
![]() da
da ![]() dimaios » 9 lug 2015, 21:56
dimaios » 9 lug 2015, 21:56
Gustav ha scritto:con quindi una involontaria azione derivativa conseguente, data dallo stadio di filtro.
Il derivatore ideale non è fisicamente realizzabile poiché anticausale per cui si ricorre ad un derivatore seguito da un filtro passa basso con un taglio in frequenza piuttosto alto rispetto alle frequenze di interesse per il controllo.
NON FISICAMENTE REALIZZABILE
 = s")
FISICAMENTE REALIZZABILE
 = \frac{s}{1 + \tau s}")
Un filtro passa basso puro non esercita alcuna azione derivativa, al più scegliendo opportunamente la costante di tempo può emulare un'azione integrale.
 = \frac{1}{1 + \tau s}")
Gustav ha scritto: Il termine D ha certamente piu senso quando nel processo il feedback e veloce, non soggetto a rallentamenti di propagazione dell'azione.
Questa frase non ha senso per definizione perché il termine D è parte del controllore cioè un parametro da sintetizzare ovvero l'incognita mentre le caratteristiche dinamiche del feedback sono sempre un dato del problema. Il comportamento complessivo non dipende solo da tale dinamica ma soprattutto da quella del processo che generalmente è più lenta. Il risultato finale dipende quindi da tutti gli elementi della catena e si possono avere condizioni esattamente opposte a quanto asserito.
Per capire le varie criticità e le scelte progettuali comunque è meglio far riferimento ad un caso concreto altrimenti si rischia di fare considerazioni di validità tutt'altro che generale senza comprendere il ragionamento ingegneristico che impone o suggerisce una scelta anzichè un'altra.
Ingegneria : alternativa intelligente alla droga.
-
dimaios
30,2k 7 10 12 - G.Master EY
- Messaggi: 3381
- Iscritto il: 24 ago 2010, 14:12
- Località: Behind the scenes

-

 carlomariamanenti
carlomariamanenti
60,1k 6 11 13 - G.Master EY
- Messaggi: 4324
- Iscritto il: 18 gen 2012, 10:44
23 messaggi
• Pagina 2 di 3 • 1, 2, 3
Torna a Automazione industriale ed azionamenti
Chi c’è in linea
Visitano il forum: Nessuno e 16 ospiti