
 Elettrotecnica e non solo (admin)
Elettrotecnica e non solo (admin) Un gatto tra gli elettroni (IsidoroKZ)
Un gatto tra gli elettroni (IsidoroKZ) Esperienza e simulazioni (g.schgor)
Esperienza e simulazioni (g.schgor) Moleskine di un idraulico (RenzoDF)
Moleskine di un idraulico (RenzoDF) Il Blog di ElectroYou (webmaster)
Il Blog di ElectroYou (webmaster) Idee microcontrollate (TardoFreak)
Idee microcontrollate (TardoFreak) PICcoli grandi PICMicro (Paolino)
PICcoli grandi PICMicro (Paolino) Il blog elettrico di carloc (carloc)
Il blog elettrico di carloc (carloc) DirtEYblooog (dirtydeeds)
DirtEYblooog (dirtydeeds) Di tutto... un po' (jordan20)
Di tutto... un po' (jordan20) AK47 (lillo)
AK47 (lillo) Esperienze elettroniche (marco438)
Esperienze elettroniche (marco438) Telecomunicazioni musicali (clavicordo)
Telecomunicazioni musicali (clavicordo) Automazione ed Elettronica (gustavo)
Automazione ed Elettronica (gustavo) Direttive per la sicurezza (ErnestoCappelletti)
Direttive per la sicurezza (ErnestoCappelletti) EYnfo dall'Alaska (mir)
EYnfo dall'Alaska (mir) Apriamo il quadro! (attilio)
Apriamo il quadro! (attilio) H7-25 (asdf)
H7-25 (asdf) Passione Elettrica (massimob)
Passione Elettrica (massimob) Elettroni a spasso (guidob)
Elettroni a spasso (guidob) Bloguerra (guerra)
Bloguerra (guerra)Salve a tutti!
Quando si parla di sintesi deadbeat con risposta piatta ad un ingresso a gradino, si fa riferimento a questo teorema:
"se ∃ un istante di campionamento k t.c ∀h≥k valgano le seguenti condizioni:
-e(h) = 0 (segnale dell'errore);
-u(h) = cost (variabile di controllo)
allora, purchè si sia scelto il passo di campionamento T con una certa cautela, si avrà che l’uscita y(t) del processo in risposta ad un gradino assume identicamente il valore desiderato per ogni t≥ kT (risposta piatta)".
Sapete se risulta valida anche l'implicazione inversa?
Grazie.
Sintesi Deadbeat risposta piatta
Moderatori: ![]() dimaios,
dimaios, ![]() carlomariamanenti
carlomariamanenti
16 messaggi
• Pagina 1 di 2 • 1, 2

0
voti
[2] Re: Sintesi Deadbeat risposta piatta
![]() da
da ![]() SandroCalligaro » 12 set 2016, 10:59
SandroCalligaro » 12 set 2016, 10:59
Il "teorema" mi sembra piuttosto lapalissiano.
Forse lo leggo superficialmente, ma per me dice che se l'errore è nullo da un certo istante in poi, allora da quell'istante in poi l'errore sarà nullo...
Forse lo leggo superficialmente, ma per me dice che se l'errore è nullo da un certo istante in poi, allora da quell'istante in poi l'errore sarà nullo...
-

 SandroCalligaro
SandroCalligaro
2.970 2 4 5 - G.Master EY

- Messaggi: 1181
- Iscritto il: 6 ago 2015, 19:25
0
voti
[3] Re: Sintesi Deadbeat risposta piatta
![]() da
da ![]() SandroCalligaro » 12 set 2016, 12:43
SandroCalligaro » 12 set 2016, 12:43
Scusa, l'ho letto meglio e credo di aver colto...
-
SandroCalligaro
2.970 2 4 5 - G.Master EY
- Messaggi: 1181
- Iscritto il: 6 ago 2015, 19:25
0
voti
[4] Re: Sintesi Deadbeat risposta piatta
![]() da
da ![]() dimaios » 12 set 2016, 14:46
dimaios » 12 set 2016, 14:46
Cioè vorresti sapere se un sistema retroazionato deadbeat è asintoticamente stabile ingresso-uscita ?
Ingegneria : alternativa intelligente alla droga.
-

 dimaios
dimaios
30,2k 7 10 12 - G.Master EY
- Messaggi: 3381
- Iscritto il: 24 ago 2010, 14:12
- Località: Behind the scenes
0
voti
[5] Re: Sintesi Deadbeat risposta piatta
![]() da
da ![]() SandroCalligaro » 12 set 2016, 16:37
SandroCalligaro » 12 set 2016, 16:37
Se ho capito bene, vorresti sapere se è vero che
se
la risposta al gradino assume il valore desiderato per ogni t≥ kT
allora
per ogni t≥kT
- l'errore è nullo
- la variabile di controllo è costante
Che l'errore sia nullo è ovvio.
Per la seconda tesi a me viene in mente almeno un esempio in cui non sarebbe vera.
Magari infrange qualche altra condizione del teorema che non hai menzionato, ma provo a proportelo lo stesso...
Supponi di voler regolare un processo che sia una derivata:

Per avere, in risposta ad un gradino, errore nullo (cioè costante) per t≥kT, dovrai avere l'ingresso di controllo pari all'integrale di una costante.
costante) per t≥kT, dovrai avere l'ingresso di controllo pari all'integrale di una costante.
se
la risposta al gradino assume il valore desiderato per ogni t≥ kT
allora
per ogni t≥kT
- l'errore è nullo
- la variabile di controllo è costante
Che l'errore sia nullo è ovvio.
Per la seconda tesi a me viene in mente almeno un esempio in cui non sarebbe vera.
Magari infrange qualche altra condizione del teorema che non hai menzionato, ma provo a proportelo lo stesso...
Supponi di voler regolare un processo che sia una derivata:
Per avere, in risposta ad un gradino, errore nullo (cioè
costante) per t≥kT, dovrai avere l'ingresso di controllo pari all'integrale di una costante.-
SandroCalligaro
2.970 2 4 5 - G.Master EY
- Messaggi: 1181
- Iscritto il: 6 ago 2015, 19:25
0
voti
[6] Re: Sintesi Deadbeat risposta piatta
![]() da
da ![]() Stefano91 » 12 set 2016, 17:47
Stefano91 » 12 set 2016, 17:47
SandroCalligaro ha scritto:Se ho capito bene, vorresti sapere se è vero che
se
la risposta al gradino assume il valore desiderato per ogni t≥ kT
allora
per ogni t≥kT
- l'errore è nullo
- la variabile di controllo è costante
Esatto. E' proprio quello che vorrei sapere.
SandroCalligaro ha scritto:Che l'errore sia nullo è ovvio.
Per la seconda tesi a me viene in mente almeno un esempio in cui non sarebbe vera.
Magari infrange qualche altra condizione del teorema che non hai menzionato, ma provo a proportelo lo stesso...
Supponi di voler regolare un processo che sia una derivata:
Per avere, in risposta ad un gradino, errore nullo (cioè
Però, io so che il processo "derivatore" è fisicamente non realizzabile. Cosa accadrebbe con un sistema fisicamente realizzabile, ad esempio G(s)=1/(s+p) con p>0?
La mia idea è la seguente: considerato un generico processo G(s)=1/(s+p), se sappiamo che la risposta complessiva del sistema(al gradino) assume il valore desiderato per ogni t≥ kT allora per ogni t≥kT:
-sicuramente ∀h≥k e(h)=0(come hai detto anche tu).
Per quanto riguarda "u(h) = cost ∀h≥k", secondo me è verificata perché l'uscita deve necessariamente seguire l'andamento dell'ingresso e quindi costante a partire da h=k.
Ad esempio, non potrò mai avere u(h)=cost ∀h≥k+1 e l'uscita che assume identicamente il valore desiderato per ogni t≥ kT. Cioè l'uscita si assesta prima(al valore costante) che si assesti l'ingresso(cioè la variabile di controllo).
Cosa ne pensi?
0
voti
[7] Re: Sintesi Deadbeat risposta piatta
![]() da
da ![]() SandroCalligaro » 12 set 2016, 18:22
SandroCalligaro » 12 set 2016, 18:22
Però, io so che il processo "derivatore" è fisicamente non realizzabile. Cosa accadrebbe con un sistema fisicamente realizzabile, ad esempio G(s)=1/(s+p) con p>0?
Credo che la stessa cosa che ho detto sopra possa essere verificata anche per un processo passa-alto, che è perfettamente realizzabile nella realtà.
Se restringi i possibili processi a dei passa-basso penso sia vera.
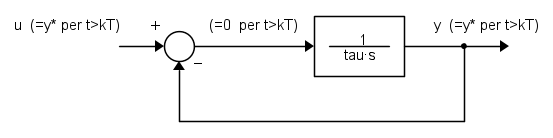
Prendi un passa-basso a guadagno DC unitario (per semplicità).
Disegnalo come un integratore con retroazione.
Potrai vedere che, quando l'uscita ha il valore desiderato, per mantenerla costante occorre che l'ingresso dell'integratore sia nullo, cioè occorre applicare il valore desiderato all'ingresso.
-
SandroCalligaro
2.970 2 4 5 - G.Master EY
- Messaggi: 1181
- Iscritto il: 6 ago 2015, 19:25
0
voti
[8] Re: Sintesi Deadbeat risposta piatta
![]() da
da ![]() Stefano91 » 12 set 2016, 18:42
Stefano91 » 12 set 2016, 18:42
SandroCalligaro ha scritto:Però, io so che il processo "derivatore" è fisicamente non realizzabile. Cosa accadrebbe con un sistema fisicamente realizzabile, ad esempio G(s)=1/(s+p) con p>0?
Credo che la stessa cosa che ho detto sopra possa essere verificata anche per un processo passa-alto, che è perfettamente realizzabile nella realtà.
Se restringi i possibili processi a dei passa-basso penso sia vera.
Prendi un passa-basso a guadagno DC unitario (per semplicità).
Disegnalo come un integratore con retroazione.
Potrai vedere che, quando l'uscita ha il valore desiderato, per mantenerla costante occorre che l'ingresso dell'integratore sia nullo, cioè occorre applicare il valore desiderato all'ingresso.
Ok, ti ringrazio.
Quindi, quello che ho scritto prima e cioè:
"Per quanto riguarda "u(h) = cost ∀h≥k", secondo me è verificata perché l'uscita deve necessariamente seguire l'andamento dell'ingresso e quindi costante a partire da h=k.
Ad esempio, non potrò mai avere u(h)=cost ∀h≥k+1 e l'uscita che assume identicamente il valore desiderato per ogni t≥ kT.
Infatti, una generica uscita non si potrà mai assestare (ad un valore costante) prima che si assesti l'ingresso(cioè la variabile di controllo)."
secondo te, è corretto?
0
voti
[9] Re: Sintesi Deadbeat risposta piatta
![]() da
da ![]() SandroCalligaro » 12 set 2016, 18:48
SandroCalligaro » 12 set 2016, 18:48
non potrò mai avere u(h)=cost ∀h≥k+1 e l'uscita che assume identicamente il valore desiderato per ogni t≥ kT
Credo che tu intenda
"non potrò mai avere u(h)=non cost ∀h<k+1 e l'uscita che assume identicamente il valore desiderato per ogni t≥ kT" o qualcosa del genere...
-
SandroCalligaro
2.970 2 4 5 - G.Master EY
- Messaggi: 1181
- Iscritto il: 6 ago 2015, 19:25
0
voti
[10] Re: Sintesi Deadbeat risposta piatta
![]() da
da ![]() Stefano91 » 12 set 2016, 20:22
Stefano91 » 12 set 2016, 20:22
SandroCalligaro ha scritto:non potrò mai avere u(h)=cost ∀h≥k+1 e l'uscita che assume identicamente il valore desiderato per ogni t≥ kT
Credo che tu intenda
"non potrò mai avere u(h)=non cost ∀h<k+1 e l'uscita che assume identicamente il valore desiderato per ogni t≥ kT" o qualcosa del genere...
Io intendo che: poiché una generica uscita non si potrà mai assestare (ad un valore costante) prima che si assesti l'ingresso(cioè la variabile di controllo), cioè non si verificherà mai che, con u(h)=cost ∀h≥k+1, l'uscita sia costante per ogni t≥ kT, allora al massimo potrò avere che u(h)=cost ∀h≥k con un'uscita costante per ogni t≥ kT.
16 messaggi
• Pagina 1 di 2 • 1, 2
Torna a Automazione industriale ed azionamenti
Chi c’è in linea
Visitano il forum: Nessuno e 8 ospiti