
 Elettrotecnica e non solo (admin)
Elettrotecnica e non solo (admin) Un gatto tra gli elettroni (IsidoroKZ)
Un gatto tra gli elettroni (IsidoroKZ) Esperienza e simulazioni (g.schgor)
Esperienza e simulazioni (g.schgor) Moleskine di un idraulico (RenzoDF)
Moleskine di un idraulico (RenzoDF) Il Blog di ElectroYou (webmaster)
Il Blog di ElectroYou (webmaster) Idee microcontrollate (TardoFreak)
Idee microcontrollate (TardoFreak) PICcoli grandi PICMicro (Paolino)
PICcoli grandi PICMicro (Paolino) Il blog elettrico di carloc (carloc)
Il blog elettrico di carloc (carloc) DirtEYblooog (dirtydeeds)
DirtEYblooog (dirtydeeds) Di tutto... un po' (jordan20)
Di tutto... un po' (jordan20) AK47 (lillo)
AK47 (lillo) Esperienze elettroniche (marco438)
Esperienze elettroniche (marco438) Telecomunicazioni musicali (clavicordo)
Telecomunicazioni musicali (clavicordo) Automazione ed Elettronica (gustavo)
Automazione ed Elettronica (gustavo) Direttive per la sicurezza (ErnestoCappelletti)
Direttive per la sicurezza (ErnestoCappelletti) EYnfo dall'Alaska (mir)
EYnfo dall'Alaska (mir) Apriamo il quadro! (attilio)
Apriamo il quadro! (attilio) H7-25 (asdf)
H7-25 (asdf) Passione Elettrica (massimob)
Passione Elettrica (massimob) Elettroni a spasso (guidob)
Elettroni a spasso (guidob) Bloguerra (guerra)
Bloguerra (guerra)No. Il reference non è una forza ma una posizione.
Tu dici al sistema retroazionato dove andare per cui esprimi il tuo "desiderio" riguardo la traiettoria che desideri segua ed il controllore in base all'errore genera una forza che pilota il sistema fisico.
Spiegazione PID
Moderatori: ![]() dimaios,
dimaios, ![]() carlomariamanenti
carlomariamanenti
30 messaggi
• Pagina 3 di 3 • 1, 2, 3
0
voti
[22] Re: Spiegazione PID
![]() da
da ![]() stardust79 » 25 ago 2018, 1:05
stardust79 » 25 ago 2018, 1:05
Ottimo, era l'idea che mi ero sempre fatto.
Rimane solo un punto. Lo schema a blocchi é questo quindi:
Gp è la FDT del plant con Gp =}{F(s)}=\frac{1}{Ms^2+bs+k}=\frac{1}{s^2+10s+20}")
La FDT di anello chiuso sarà}{X_0(s)}=") ovvero X reale fratto X desisderata.
ovvero X reale fratto X desisderata.
Dai miei conti FDT close loop}{X_0(s)}=\frac{K_ds^2+K_ps+K_i}{s^3+(10+K_d)s^2+(20+K_p)s+K_i}")
invece National instrument sostiene che :
}{F(s)}=\frac{K_ds^2+K_ps+K_i}{s^3+(10+K_d)s^2+(20+K_p)s+K_i}")
a sinistra dell'uguale dell'ultima espressione non abbiamo altro che uscita fratto entrata dell'anello aperto (o della sola sola Gp G di plant). Pertanto cosa non mi torna???
Grazie mille. Ciao.
Rimane solo un punto. Lo schema a blocchi é questo quindi:

Gp è la FDT del plant con Gp =
La FDT di anello chiuso sarà
ovvero X reale fratto X desisderata.Dai miei conti FDT close loop
invece National instrument sostiene che :
a sinistra dell'uguale dell'ultima espressione non abbiamo altro che uscita fratto entrata dell'anello aperto (o della sola sola Gp G di plant). Pertanto cosa non mi torna???
Grazie mille. Ciao.
-

 stardust79
stardust79
85 1 2 7 - Stabilizzato

- Messaggi: 330
- Iscritto il: 24 dic 2013, 18:13
3
voti
[23] Re: Spiegazione PID
![]() da
da ![]() dimaios » 25 ago 2018, 5:04
dimaios » 25 ago 2018, 5:04
Hanno continuato a chiamare inopportunamente l'ingresso con la lettera F che oggettivamente può confondere ma la relazione non può dar luogo ad ambiguità, trattasi della funzione di trasferimento ad anello chiuso.
Una piccola nota. Nello schema FidoCADJ hai indicato le posizioni nel tempo con le lettere maiuscole.
La regola vuole che le variabili nel tempo siano indicate con le lettere minuscole e quelle in frequenza con le maiuscole per cui") e
e ") .
.
Una piccola nota. Nello schema FidoCADJ hai indicato le posizioni nel tempo con le lettere maiuscole.
La regola vuole che le variabili nel tempo siano indicate con le lettere minuscole e quelle in frequenza con le maiuscole per cui
e .Ingegneria : alternativa intelligente alla droga.
-

 dimaios
dimaios
30,2k 7 10 12 - G.Master EY

- Messaggi: 3381
- Iscritto il: 24 ago 2010, 14:12
- Località: Behind the scenes
0
voti
[24] Re: Spiegazione PID
![]() da
da ![]() stardust79 » 25 ago 2018, 13:22
stardust79 » 25 ago 2018, 13:22
dimaios ha scritto:Hanno continuato a chiamare inopportunamente l'ingresso con la lettera F che oggettivamente può confondere ma la relazione non può dar luogo ad ambiguità, trattasi della funzione di trasferimento ad anello chiuso.
Ottimo grazie.

Lasciami pero' dire che non è un banale errorre.
A mio modo di vedere é un errore concettuale gravissimo. Lo scopo di quell'articolo è fare didattica e diversi passaggi sono saltati, se poi si compie un errore di tale portata, lo studente é messo veramente in difficoltà.
Mi stupisco del fatto che nessuno si sia accorto e metto quindi in dubbio cosa abbia appreso chi non ha sollevato il dubbio.
Tornando al nostro esempio
FDT close loop
se impongo uno scalino unitario all'ingresso (desidero uno spostamento a gradino insomma)
}=1/s")
avro' che la risposta della FDT in anello chiuso al gradino unitario é questa giusto ?
=\frac{K_ds^2+K_ps+K_i}{s^3+(10+K_d)s^2+(20+K_p)s+K_i}\cdot \frac{1}{s}")
e se poi antitrasformo quest'ultima
ottengo la x(t) della risposta al gradino ? Grazie ciao.
Ultima modifica di stardust79 il 25 ago 2018, 13:39, modificato 1 volta in totale.
-
stardust79
85 1 2 7 - Stabilizzato
- Messaggi: 330
- Iscritto il: 24 dic 2013, 18:13
 anziché per
anziché per  ?
?0
voti
[26] Re: Spiegazione PID
![]() da
da ![]() stardust79 » 25 ago 2018, 13:39
stardust79 » 25 ago 2018, 13:39
si scusa ho corretto mentre tu scrivevi messaggio
-
stardust79
85 1 2 7 - Stabilizzato
- Messaggi: 330
- Iscritto il: 24 dic 2013, 18:13
0
voti
[28] Re: Spiegazione PID
![]() da
da ![]() stardust79 » 3 set 2018, 10:10
stardust79 » 3 set 2018, 10:10
Buona settimana. HO ancora una domanda.
Preso il nostro esempio della Texas Instrument.
Il blocco del controller Gc sarà un PID e quindi conterrà un polo e uno zero.
Il posizionamento di tale polo e zero (lead vs lag compensator) dipendera dalla struttura della Gp oppure il posizionamento di polo e zero è sempre in una sola direzione ? grazie ciao.
Preso il nostro esempio della Texas Instrument.
Il blocco del controller Gc sarà un PID e quindi conterrà un polo e uno zero.
Il posizionamento di tale polo e zero (lead vs lag compensator) dipendera dalla struttura della Gp oppure il posizionamento di polo e zero è sempre in una sola direzione ? grazie ciao.
-
stardust79
85 1 2 7 - Stabilizzato
- Messaggi: 330
- Iscritto il: 24 dic 2013, 18:13
2
voti
[29] Re: Spiegazione PID
![]() da
da ![]() dimaios » 4 set 2018, 0:06
dimaios » 4 set 2018, 0:06
stardust79 ha scritto:Preso il nostro esempio della Texas Instrument.
Certo che quelli della National Instruments proprio non li digerisci ( vedi post [18] ).
stardust79 ha scritto: ...un PID quindi conterrà un polo e uno zero
Davvero? Prova a scriverla.
NOTA : Scrivi la funzione di trasferimento di un PID ideale e poi di un PID reale inserendo un filtro passa basso nella parte derivativa che altrimenti risulta non realizzabile fisicamente.
Disegna il luogo delle radici qualitativo dei due regolatori ed il diagramma di Bode.
stardust79 ha scritto:Il posizionamento di tale polo e zero (lead vs lag compensator)
Lead e lag compensator non hanno molto a che fare con il PID di cui sopra. Sono tecniche di compensazione diverse da applicarsi all'occorrenza altrimenti non avrebbero nomi diversi. Rispondi prima alla domanda sopra e vedrai che è così.
stardust79 ha scritto:dipendera dalla struttura della Gp oppure il posizionamento di polo e zero è sempre in una sola direzione
Cosa vuol dire che il posizionamento di polo e zero è sempre in una sola direzione?
I parametri del PID, lo abbiamo detto molti post or sono, dipendono da
") ed il come dipende dalla funzione di costo impostata.
ed il come dipende dalla funzione di costo impostata.Fissa le caratteristiche del sistema a catena chiusa e ricava i parametri che approssimano tale richiesta.
In alternativa scegli una tecnica di taratura standard che si riferisce a processi specifici ( nei quali il tuo deve rientrare ) e funzioni di costo predefinite.
Ingegneria : alternativa intelligente alla droga.
-
dimaios
30,2k 7 10 12 - G.Master EY
- Messaggi: 3381
- Iscritto il: 24 ago 2010, 14:12
- Località: Behind the scenes
0
voti
[30] Re: Spiegazione PID
![]() da
da ![]() stardust79 » 12 set 2018, 17:22
stardust79 » 12 set 2018, 17:22
Dopo lungo peregrinare ho trovato forse. Potresti cortesemente controllare se ho messo pedici e simboli giusti ? Grazie.
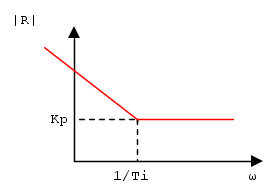
PI reale
=K_p\frac{1+sT_i}{sT_i}")
_____________________________________________________________________________________
PD reale
=K_p\frac{1+s\tau}{1+sT}")
_____________________________________________________________________
PID reale
=K_p\frac{(1+s\tau_1)(1+s\tau_2)}{s T_i (1+sT)}")
PI reale
_____________________________________________________________________________________
PD reale

_____________________________________________________________________
PID reale

-
stardust79
85 1 2 7 - Stabilizzato
- Messaggi: 330
- Iscritto il: 24 dic 2013, 18:13
30 messaggi
• Pagina 3 di 3 • 1, 2, 3
Torna a Automazione industriale ed azionamenti
Chi c’è in linea
Visitano il forum: Nessuno e 1 ospite