
 Elettrotecnica e non solo (admin)
Elettrotecnica e non solo (admin) Un gatto tra gli elettroni (IsidoroKZ)
Un gatto tra gli elettroni (IsidoroKZ) Esperienza e simulazioni (g.schgor)
Esperienza e simulazioni (g.schgor) Moleskine di un idraulico (RenzoDF)
Moleskine di un idraulico (RenzoDF) Il Blog di ElectroYou (webmaster)
Il Blog di ElectroYou (webmaster) Idee microcontrollate (TardoFreak)
Idee microcontrollate (TardoFreak) PICcoli grandi PICMicro (Paolino)
PICcoli grandi PICMicro (Paolino) Il blog elettrico di carloc (carloc)
Il blog elettrico di carloc (carloc) DirtEYblooog (dirtydeeds)
DirtEYblooog (dirtydeeds) Di tutto... un po' (jordan20)
Di tutto... un po' (jordan20) AK47 (lillo)
AK47 (lillo) Esperienze elettroniche (marco438)
Esperienze elettroniche (marco438) Telecomunicazioni musicali (clavicordo)
Telecomunicazioni musicali (clavicordo) Automazione ed Elettronica (gustavo)
Automazione ed Elettronica (gustavo) Direttive per la sicurezza (ErnestoCappelletti)
Direttive per la sicurezza (ErnestoCappelletti) EYnfo dall'Alaska (mir)
EYnfo dall'Alaska (mir) Apriamo il quadro! (attilio)
Apriamo il quadro! (attilio) H7-25 (asdf)
H7-25 (asdf) Passione Elettrica (massimob)
Passione Elettrica (massimob) Elettroni a spasso (guidob)
Elettroni a spasso (guidob) Bloguerra (guerra)
Bloguerra (guerra)TardoFreak ha scritto: Quello che sto cercando di capire è come trasportare la teoria dei servomeccanismi sui micro, per capire se in alcuni casi potrebbe essermi utile o no.
Assolutamente si. Il controllo digitale in tempo reale è una delle tecniche più utilizzate in assoluto.
Con l'avvento di microcontrollori che possono avvantaggiarsi dell'uso del floating point, velocità di elaborazione notevoli ed I/O di tutto rispetto ad un costo ragionevolissimo la porta è spalancata a qualsiasi opportunità.
TardoFreak ha scritto:Scientist and Engineer's Guide to Digital Signal Processing[/url], libro bellissimo che vorrei avere in forma cartacea (ma che mi sto stampando perché amazon non mi ha riconosciuto la carta di credito).
Posseggo questo libro ( 2nd edition ) ma non è mirato al controllo. Tratta il filtraggio, la FFT, le applicazioni digitali audio video e di compressione ma non il controllo digitale industriale.
All'inizio la teoria relativa alle due materie ha molti punti in comune ma poi le strade divergono.
TardoFreak ha scritto:Nel contempo imparo qualcosa di nuovo che mi sarà comunque utile.
Proposito pregevole e degno di nota.
Mi permetto di consigliarti una risorsa a mio avviso eccellente.
Seguendo questo link arrivi ad una pagina del Politecnico di Torino.
Scarica il DVD di controlli automatici che contiene tutto il corso universitario.
E' fatto benissimo e rappresenta un ottimo ripasso.
Anche se gli argomenti vengono trattato nel dominio continuo è un passo obbligato prima di passare al discreto.
E' vero che molti controllori sono sintetizzabili direttamente nel dominio temporale discreto con performance eccellenti ma le basi rimangono sempre e comunque quelle nel dominio temporale continuo.




 e quella del coseno e`
e quella del coseno e`  , l'ampiezza complessiva del segnale a quella frequenza e`
, l'ampiezza complessiva del segnale a quella frequenza e`  e la fase e`
e la fase e` ") .
.
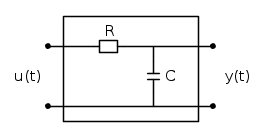
") ed in uscita la tensione
ed in uscita la tensione ") si ha :
si ha : = \frac{ \frac {1}{sC}}{ R + \frac{1}{sC}} U(s) = \frac{1}{1+ \tau s} \cdot U(s)")
 = \frac{Y(s)}{U(s)} = \frac{1}{1+ \tau s}")
 ha le dimensioni di un tempo.
ha le dimensioni di un tempo.=1(t)") ovvero lo
ovvero lo  = \frac{1}{s}") .
.![y_{step}(t) = {\mathcal{L}}^{-1} \left[ \frac{1}{s} \cdot \frac{1}{1+\tau s}\right ]={\mathcal{L}}^{-1}\left[ \frac{1}{s} - \frac{1}{s+ \frac{1}{\tau}} \right ] ={\mathcal{L}}^{-1}\left[ \frac{1}{s}\right ]-{\mathcal{L}}^{-1}\left[ \frac{1}{s+ \frac{1}{\tau}} \right ] = 1 - e^{-\frac{t}{\tau}}](/forum/latexrender/pictures/08a81c5817ebba97370649f83c3a7a2c.png "y_{step}(t) = {\mathcal{L}}^{-1} \left[ \frac{1}{s} \cdot \frac{1}{1+\tau s}\right ]={\mathcal{L}}^{-1}\left[ \frac{1}{s} - \frac{1}{s+ \frac{1}{\tau}} \right ] ={\mathcal{L}}^{-1}\left[ \frac{1}{s}\right ]-{\mathcal{L}}^{-1}\left[ \frac{1}{s+ \frac{1}{\tau}} \right ] = 1 - e^{-\frac{t}{\tau}}")
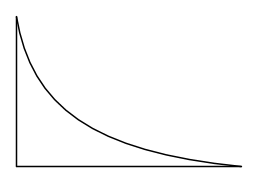
 = \delta(t)") . Nel dominio della
. Nel dominio della  = 1") .
.![y_{impulse}(t) = {\mathcal{L}}^{-1} \left[1 \cdot \frac{1}{1 + \tau s} \right ] = \frac{1}{\tau} {\mathcal{L}}^{-1}\left[ \frac{1}{s + \frac{1}{\tau}} \right ] =\frac{1}{\tau} e^{-\frac{t}{\tau}}](/forum/latexrender/pictures/78bf24cd4d9539ad05a9c62074fce47b.png "y_{impulse}(t) = {\mathcal{L}}^{-1} \left[1 \cdot \frac{1}{1 + \tau s} \right ] = \frac{1}{\tau} {\mathcal{L}}^{-1}\left[ \frac{1}{s + \frac{1}{\tau}} \right ] =\frac{1}{\tau} e^{-\frac{t}{\tau}}")
 = y_{impulse}(t) =\frac{1}{\tau} e^{-\frac{t}{\tau}}")

