1- sì, anche la sfida intellettuale è una strada interessante

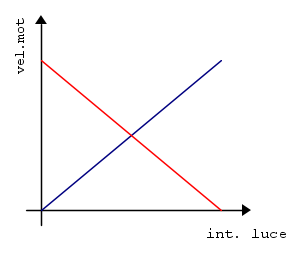
2- adesso mi metti in crisi, mi pare di sì, che varia la velocità con la quantità di luce
 Elettrotecnica e non solo (admin)
Elettrotecnica e non solo (admin) Un gatto tra gli elettroni (IsidoroKZ)
Un gatto tra gli elettroni (IsidoroKZ) Esperienza e simulazioni (g.schgor)
Esperienza e simulazioni (g.schgor) Moleskine di un idraulico (RenzoDF)
Moleskine di un idraulico (RenzoDF) Il Blog di ElectroYou (webmaster)
Il Blog di ElectroYou (webmaster) Idee microcontrollate (TardoFreak)
Idee microcontrollate (TardoFreak) PICcoli grandi PICMicro (Paolino)
PICcoli grandi PICMicro (Paolino) Il blog elettrico di carloc (carloc)
Il blog elettrico di carloc (carloc) DirtEYblooog (dirtydeeds)
DirtEYblooog (dirtydeeds) Di tutto... un po' (jordan20)
Di tutto... un po' (jordan20) AK47 (lillo)
AK47 (lillo) Esperienze elettroniche (marco438)
Esperienze elettroniche (marco438) Telecomunicazioni musicali (clavicordo)
Telecomunicazioni musicali (clavicordo) Automazione ed Elettronica (gustavo)
Automazione ed Elettronica (gustavo) Direttive per la sicurezza (ErnestoCappelletti)
Direttive per la sicurezza (ErnestoCappelletti) EYnfo dall'Alaska (mir)
EYnfo dall'Alaska (mir) Apriamo il quadro! (attilio)
Apriamo il quadro! (attilio) H7-25 (asdf)
H7-25 (asdf) Passione Elettrica (massimob)
Passione Elettrica (massimob) Elettroni a spasso (guidob)
Elettroni a spasso (guidob) Bloguerra (guerra)
Bloguerra (guerra)
Moderatori: ![]() carloc,
carloc, ![]() g.schgor,
g.schgor, ![]() BrunoValente,
BrunoValente, ![]() IsidoroKZ
IsidoroKZ
![]() da
da ![]() giorgik » 25 lug 2015, 11:35
giorgik » 25 lug 2015, 11:35
![]() da
da ![]() obiuan » 25 lug 2015, 11:49
obiuan » 25 lug 2015, 11:49
giorgik ha scritto:2- adesso mi metti in crisi, mi pare di sì, che varia la velocità con la quantità di luce
![]() da
da ![]() gill90 » 25 lug 2015, 16:20
gill90 » 25 lug 2015, 16:20
 oppure la duale con duty cycle
oppure la duale con duty cycle  , e questo si fa semplicemente con una porta NOT. In pratica la logica di inversione decide se mandare al circuito di attuazione il segnale di ingresso o il suo negato:
, e questo si fa semplicemente con una porta NOT. In pratica la logica di inversione decide se mandare al circuito di attuazione il segnale di ingresso o il suo negato:![]() da
da ![]() Orionis » 25 lug 2015, 21:53
Orionis » 25 lug 2015, 21:53
giorgik ha scritto:anche perché i PIC li so programmare.

![]() da
da ![]() giorgik » 26 lug 2015, 7:49
giorgik » 26 lug 2015, 7:49
![]() da
da ![]() MarcoD » 26 lug 2015, 8:33
MarcoD » 26 lug 2015, 8:33
giorgik ha scritto:Scusate se rispondo solo ora. Prima di tutto grazie dei vostri suggerimenti. Cerco di rispondere a tutti.
1- il TIP107 è un Darlington
2- il motoriduttore che uso utilizza tensioni che vanno da 3V fino a 12 V (a 5 V assorbe 74mA,
in stallo 670mA)
3- LDR o fotores
................
Sul motore misura:
la resistenza di armatura (ai capi dei morsetti)
la corrente di spunto
la corrente quando gira a vuoto ( senza carico)
![]() da
da ![]() gill90 » 26 lug 2015, 13:51
gill90 » 26 lug 2015, 13:51
![]() da
da ![]() giorgik » 26 lug 2015, 16:34
giorgik » 26 lug 2015, 16:34
![]() da
da ![]() MarcoD » 26 lug 2015, 17:39
MarcoD » 26 lug 2015, 17:39
giorgik ha scritto:Ancora grazie MarcoD per la risposta. Certo gill90, se si poteva usare la via analogica è meglio. In pratica ho letto un interessante libro "I veicoli pensanti" di Valentino Braitenberg...
Se avete nuove idee per ottenere tutto ciù con un circuito diverso, ne possiamo discutere.
![]() da
da ![]() giorgik » 26 lug 2015, 20:08
giorgik » 26 lug 2015, 20:08
Visitano il forum: Nessuno e 66 ospiti