
 Elettrotecnica e non solo (admin)
Elettrotecnica e non solo (admin) Un gatto tra gli elettroni (IsidoroKZ)
Un gatto tra gli elettroni (IsidoroKZ) Esperienza e simulazioni (g.schgor)
Esperienza e simulazioni (g.schgor) Moleskine di un idraulico (RenzoDF)
Moleskine di un idraulico (RenzoDF) Il Blog di ElectroYou (webmaster)
Il Blog di ElectroYou (webmaster) Idee microcontrollate (TardoFreak)
Idee microcontrollate (TardoFreak) PICcoli grandi PICMicro (Paolino)
PICcoli grandi PICMicro (Paolino) Il blog elettrico di carloc (carloc)
Il blog elettrico di carloc (carloc) DirtEYblooog (dirtydeeds)
DirtEYblooog (dirtydeeds) Di tutto... un po' (jordan20)
Di tutto... un po' (jordan20) AK47 (lillo)
AK47 (lillo) Esperienze elettroniche (marco438)
Esperienze elettroniche (marco438) Telecomunicazioni musicali (clavicordo)
Telecomunicazioni musicali (clavicordo) Automazione ed Elettronica (gustavo)
Automazione ed Elettronica (gustavo) Direttive per la sicurezza (ErnestoCappelletti)
Direttive per la sicurezza (ErnestoCappelletti) EYnfo dall'Alaska (mir)
EYnfo dall'Alaska (mir) Apriamo il quadro! (attilio)
Apriamo il quadro! (attilio) H7-25 (asdf)
H7-25 (asdf) Passione Elettrica (massimob)
Passione Elettrica (massimob) Elettroni a spasso (guidob)
Elettroni a spasso (guidob) Bloguerra (guerra)
Bloguerra (guerra)In tutta l'ingegneria c'e` sempre un compromesso fra diverse esigenze e non c'e` mai (per definizione di ingegneria) la formuletta da applicare: le cose sono sempre incasinate!
Ora provo a sviluppare un secondo approccio, che va (in teoria) un po' piu` vicino alla soluzione. Ovviamente si fanno i conti approssimati, si guarda di essere nella buona direzione, poi si affina il progetto con qualche metodo piu` potente, tipo Matlab, Matematica...
L'idea base e` che si conoscono abbastanza bene i sistemi del secondo ordine (quelli con cui hai fatto la stima dei parametri richiesti per ottenere le performance volute), e quindi si cerca di far diventare approssimativamente il sistema dato in uno del secondo ordine.
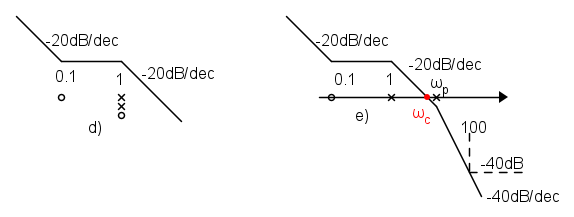
Si sa inoltre gia` che c'e` un polo nell'origine che viene attratto dallo zero in -0.1 e che quindi da` origine a un doppietto. Per ridurne l'effetto bisogna aumentare il guadagno a sufficienza per fare in modo che il doppietto sia abbastanza stretto e l'effetto sull'ampliezza sia ridotto.
Un'idea e` di mettere un polo nell'origine e uno zero a -1, in modo da cancellare uno dei due poli: il sistema diventa qualcosa del genere mostrato nella figura d), che e` facile da calcolare anche a mano.
Se non si fa nient'altro, diventa difficile rispettare la specifica di attenuazione del rumore perche' se si vuole avere -40dB di guadagno di anello a 100rad/s, scendendo con una pendenza di 20dB/dec bisogna andare in crossover
 che e` molto bassa, e avremmo fra i piedi il doppietto, oltre ai problemi di sensibilita` che si hanno ad andare in crossover con pendenza molto bassa.
che e` molto bassa, e avremmo fra i piedi il doppietto, oltre ai problemi di sensibilita` che si hanno ad andare in crossover con pendenza molto bassa.Inoltre il margine di fase sarebbe comunque sempre maggiore di 90° con le conseguenze sul tempo di assestamento.
E` pertanto necessario introdurre un secondo polo in modo da aumentare l'attenuazione dopo il crossover e di portare il margine di fase a 60°, ottenendo qualcosa del tipo di figura e)
dove
 e` la frequenza di crossover, mentre
e` la frequenza di crossover, mentre  e` la frequenza del polo aggiunto. La posizione delle due frequenze la si ottiene imponendo che l'attenuazione a
e` la frequenza del polo aggiunto. La posizione delle due frequenze la si ottiene imponendo che l'attenuazione a  valga
valga  che corrisponde a un fattore 0.01.
che corrisponde a un fattore 0.01.I conti approssimati si fanno sul diagramma asintotico, con le regole fornite in questo articolo, e si ipotizza anche che il tratto con pendenza di -20dB/dec sia cominciato a frequenze molto basse e il contributo di fase sia -90°. In figura f) ho solo ingrandito un pochino la figura e)
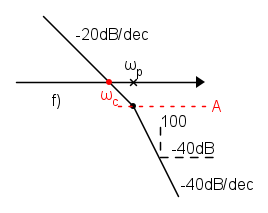
Volendo ottenere un margine di fase di 60°, la fase ad
deve essere di -120°. Un primo contributo di -90° e` dato dal polo a frequenze molto basse, per cui il polo in
deve dare alla frequenza un contributo di fase di -30°. Questo lo si ottiene imponendo che ") da cui
da cui  .
. Essendo il guadagno alla frequenza di crossover pari a 1, il guadagno ad
vale 0.577. Per scendere fino a 0.01 si ha un rapporto di guadagni di 57.7, e quindi il rapporto delle frequenze, essendo la pendenza di -40dB/dec diventa  .
. In definitiva la frequenza del polo deve essere
 e la frequenza di crossover vale
e la frequenza di crossover vale 
La cosa buona e` che comunque abbiamo ottenuto una frequenza di crossover minore della frequenza del polo, e circa tre ottave piu` alta del polo in
 . Cio` significa che questo polo non da` praticamente nessun effetto sull'ampiezza, ma fa ancora sentire la sua presenza sulla fase.
. Cio` significa che questo polo non da` praticamente nessun effetto sull'ampiezza, ma fa ancora sentire la sua presenza sulla fase.Avendo questa prima stima, si puo`procedere a un calcolo un po' piu` preciso, considerando che il polo a
non e` molto distante dal crossover e quindi il suo contributo di fase non e` di -90° ma solo di circa =-82.5^\circ") , e che la frequenza di crossover non e` quella dove il diagramma asintotico intercetta l'asse a 0dBm, ma dove il diagramma vero intercetta l'asse, quindi a frequenza minore, vedi figura g) [Chi e` che diceva che con FidoCadJ non si possono disegnare i diagrammi di Bode?]
, e che la frequenza di crossover non e` quella dove il diagramma asintotico intercetta l'asse a 0dBm, ma dove il diagramma vero intercetta l'asse, quindi a frequenza minore, vedi figura g) [Chi e` che diceva che con FidoCadJ non si possono disegnare i diagrammi di Bode?]Per migliorare l'approssimazione dobbiamo tenere conto che il polo in
deve fornire un ritardo di fase di circa -37.5°, per compensare la relativa vicinanza del polo in . Il rapporto fra frequenza di crossover e frequenza del polo diventa quindi
") da cui
da cui  . Questa e` solo una prima approssimazione, si potrebbe iterare come fatto in precedenza affinando il risultato tenendo conto della fase del polo a frequenza piu` bassa.
. Questa e` solo una prima approssimazione, si potrebbe iterare come fatto in precedenza affinando il risultato tenendo conto della fase del polo a frequenza piu` bassa. Bisogna pero` inoltre considerare che la frequenza di crossover
non corrisponde piu` alla frequenza di crossover del diagramma asintotico  , ma e` piu` bassa, come si vede dalla figura g).
, ma e` piu` bassa, come si vede dalla figura g).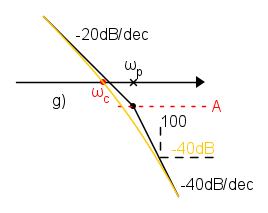
A questo punto i conti sulle ampiezze cominciano a diventare un po' pesanti
Fine della seconda parte


 , l'altro essendo cancellato dallo zero del compensatore, si usano le formule di
, l'altro essendo cancellato dallo zero del compensatore, si usano le formule di 
 (vedere la figura 4a dell'articolo citato).
(vedere la figura 4a dell'articolo citato).  , come fatto nel messaggio precedente, dove pero` si era fatta l'approssimazione che la frequenza di crossover fosse
, come fatto nel messaggio precedente, dove pero` si era fatta l'approssimazione che la frequenza di crossover fosse  , usando la (35) si calcola la frequenza di crossover
, usando la (35) si calcola la frequenza di crossover  come è chiamata nell'articolo).
come è chiamata nell'articolo).  e la frequenza di crossover
e la frequenza di crossover  . Con questo crossover la fase dovuta al polo in
. Con questo crossover la fase dovuta al polo in =-81.95^\circ") e quindi per ottenere il margine di fase richiesto basta che
e quindi per ottenere il margine di fase richiesto basta che  e la frequenza di crossover risulta pari a
e la frequenza di crossover risulta pari a  .
.
