
 Elettrotecnica e non solo (admin)
Elettrotecnica e non solo (admin) Un gatto tra gli elettroni (IsidoroKZ)
Un gatto tra gli elettroni (IsidoroKZ) Esperienza e simulazioni (g.schgor)
Esperienza e simulazioni (g.schgor) Moleskine di un idraulico (RenzoDF)
Moleskine di un idraulico (RenzoDF) Il Blog di ElectroYou (webmaster)
Il Blog di ElectroYou (webmaster) Idee microcontrollate (TardoFreak)
Idee microcontrollate (TardoFreak) PICcoli grandi PICMicro (Paolino)
PICcoli grandi PICMicro (Paolino) Il blog elettrico di carloc (carloc)
Il blog elettrico di carloc (carloc) DirtEYblooog (dirtydeeds)
DirtEYblooog (dirtydeeds) Di tutto... un po' (jordan20)
Di tutto... un po' (jordan20) AK47 (lillo)
AK47 (lillo) Esperienze elettroniche (marco438)
Esperienze elettroniche (marco438) Telecomunicazioni musicali (clavicordo)
Telecomunicazioni musicali (clavicordo) Automazione ed Elettronica (gustavo)
Automazione ed Elettronica (gustavo) Direttive per la sicurezza (ErnestoCappelletti)
Direttive per la sicurezza (ErnestoCappelletti) EYnfo dall'Alaska (mir)
EYnfo dall'Alaska (mir) Apriamo il quadro! (attilio)
Apriamo il quadro! (attilio) H7-25 (asdf)
H7-25 (asdf) Passione Elettrica (massimob)
Passione Elettrica (massimob) Elettroni a spasso (guidob)
Elettroni a spasso (guidob) Bloguerra (guerra)
Bloguerra (guerra)
Indice |
Schema di riferimento
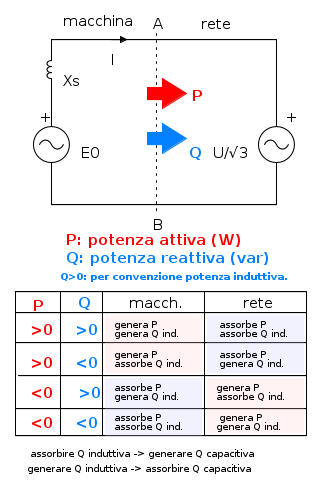
La macchina sincrona trifase è la principale sorgente della potenza elettrica trasmessa.
Consideriamo per semplicità una macchina isotropa (a poli lisci) non satura. Una fase di si può schematizzare con il circuito equivalente costituito da un generatore ideale di tensione E0, il cui valore efficace dipende dalla corrente di eccitazione, in serie ad una reattanza Xs costante (reattanza sincrona).
L'insieme di tutti gli altri generatori sincroni, in pratica l'intera rete, può essere visto come un generatore di tensione ideale a frequenza costante.
Lo schema di riferimento per una fase è dunque quello di figura.
Nella rappresentazione di tensione e corrente si è adottata per la macchina la convenzione del generatore. La rete è di conseguenza vista dalla macchina come utilizzatore. Attraverso la sezione AB si ha il flusso delle potenze di scambio tra macchina e rete.
La tabella riassume le possibili situazioni che saranno singolarmente descritte.
Indicando con  l'angolo di sfasamento tra la tensione della rete e la corrente, le potenze di una fase, tenendo conto che l'angolo è da considerare positivo se la corrente ritarda sulla tensione, negativo se anticipa, si calcolano in valore e segno con
l'angolo di sfasamento tra la tensione della rete e la corrente, le potenze di una fase, tenendo conto che l'angolo è da considerare positivo se la corrente ritarda sulla tensione, negativo se anticipa, si calcolano in valore e segno con

- Nota: nei diagrammi fasoriali l'angolo è segnalato con una freccia che indica il senso di rotazione del fasore corrente per sovrapporsi al fasore tensione descrivendo l'angolo minore di π; quindi:

La messa in parallelo
Il collegamento di una macchina alla rete, cioè la messa in parallelo, si effettua portando la macchina alla velocità n0 = 60f / p con f frequenza di rete e p coppie polari della macchina, ed impostando l'eccitazione in modo che  dove U è la tensione di rete. Quando le due tensioni sono perfettamente in fase, si chiude l'interruttore del parallelo. In queste condizioni la corrente è nulla e non c'è alcuno scambio di potenza tra macchina e rete. La potenza richiesta alla turbina è esclusivamente quelle delle varie perdite nel ferro e per attriti meccanici.
dove U è la tensione di rete. Quando le due tensioni sono perfettamente in fase, si chiude l'interruttore del parallelo. In queste condizioni la corrente è nulla e non c'è alcuno scambio di potenza tra macchina e rete. La potenza richiesta alla turbina è esclusivamente quelle delle varie perdite nel ferro e per attriti meccanici.
Si può a questo punto:
- modificare l'eccitazione della macchina portando E0 ad assumere, rispetto alla tensione di rete, valori inferiori (sottoeccitazione) o superiori (sovraeccitazione). Ciò permetterà una regolazione del flusso di potenza reattiva.
- intervenire sulla turbina che aziona la macchina generando una coppia motrice quindi immettere potenza attiva in rete, oppure applicare una coppia frenante al rotore, quindi prelevare potenza attiva dalla rete.
Esamineremo tutte le possibili condizioni di funzionamento tracciando i diagrammi fasoriali delle grandezze elettriche.
La corrente è sempre in ritardo di  rispetto alla differenza vettoriale delle tensioni,
rispetto alla differenza vettoriale delle tensioni,

che si ottiene graficamente tracciando un segmento parallelo a quello che unisce gli estremi dei due vettori orientandolo vero E0
- Nota: ritardo ed anticipo nei titoli dei paragrafi, sono riferiti alla E0, tensione a vuoto della macchina, rispetto alla tensione di rete
Sottoeccitazione:
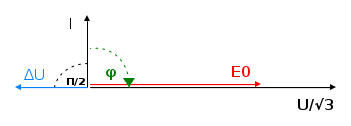
La corrente erogata dalla macchina è in anticipo di 90° rispetto alla tensione di rete; la potenza attiva scambiata con la rete è nulla mentre e la potenza reattiva erogata ad essa è negativa. La rete è, per la macchina, un condensatore, cioè un erogatore di potenza induttiva o, ciò che è lo stesso, la macchina è vista dalla rete come un induttore puro.
Sovraeccitazione: 
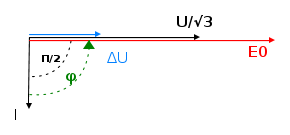
La corrente è in ritardo di 90° sulla tensione di rete. La potenza attiva immessa in rete è ancora nulla e la potenza reattiva è positiva. La rete dunque assorbe potenza reattiva induttiva. Stavolta è la macchina ad essere un condensatore puro per la rete.
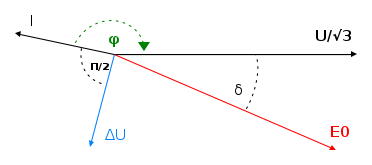
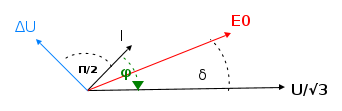
Anticipo:
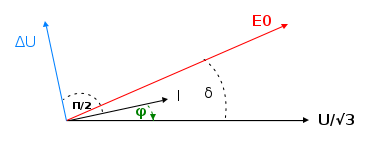
L'eccitazione è mantenuta immutata per cui . L'anticipo di  su
su  si ottiene accelerando la macchina, cioè immettendo potenza nella turbina che la aziona. L'accelerazione cessa al raggiungimento dell'equilibrio tra la coppia sviluppata dalla turbina e la coppia frenante che nasce tra il campo magnetico di rotore e quello di statore i cui assi fisici si discostano dell'angolo δ / p (p:coppie polari). L'angolo δ (angolo di potenza o di carico) definisce la posizione di equilibrio, e ad esso è legata la potenza attiva immessa nella rete. La potenza reattiva è negativa in quanto la corrente assorbita dalla rete risulta in anticipo sulla tensione, come mostra il grafico. La rete è, per la macchina, un motore che assorbe, oltre alla potenza attiva da essa generata, una potenza reattiva capacitiva o, ciò che è lo stesso, le eroga potenza induttiva.
si ottiene accelerando la macchina, cioè immettendo potenza nella turbina che la aziona. L'accelerazione cessa al raggiungimento dell'equilibrio tra la coppia sviluppata dalla turbina e la coppia frenante che nasce tra il campo magnetico di rotore e quello di statore i cui assi fisici si discostano dell'angolo δ / p (p:coppie polari). L'angolo δ (angolo di potenza o di carico) definisce la posizione di equilibrio, e ad esso è legata la potenza attiva immessa nella rete. La potenza reattiva è negativa in quanto la corrente assorbita dalla rete risulta in anticipo sulla tensione, come mostra il grafico. La rete è, per la macchina, un motore che assorbe, oltre alla potenza attiva da essa generata, una potenza reattiva capacitiva o, ciò che è lo stesso, le eroga potenza induttiva.
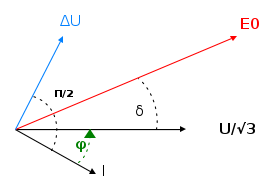
Ritardo: 
Se il rotore viene decelerato per l'applicazione di una coppia frenante, la ritarda sulla . Anche in tal caso si arriva ad una situazione di equilibrio, determinata dall'angolo δ, a cui corrisponde l'eguaglianza tra la coppia frenante applicata all'albero e quella di interazione tra i campi di rotore e di statore, che risulta motrice.
In questo caso la potenza attiva è negativa: la corrente  anticipa di un angolo maggiore di 90° la tensione di rete. Anche la potenza reattiva è negativa, se l'eccitazione è tale da mantenere l'eguaglianza dei moduli . La macchina è, per la rete, un motore che le richiede, oltre alla potenza attiva, anche una potenza reattiva induttiva.
anticipa di un angolo maggiore di 90° la tensione di rete. Anche la potenza reattiva è negativa, se l'eccitazione è tale da mantenere l'eguaglianza dei moduli . La macchina è, per la rete, un motore che le richiede, oltre alla potenza attiva, anche una potenza reattiva induttiva.
Anticipo e sovraeccitazione: 
In questo caso la corrente risulta in ritardo sulla tensione di rete di un angolo  . E' quindi positiva la potenza attiva come quella reattiva. La macchina immette dunque in rete sia potenza attiva che potenza reattiva induttiva, la rete è cioè per essa un carico ohmico-induttivo.
. E' quindi positiva la potenza attiva come quella reattiva. La macchina immette dunque in rete sia potenza attiva che potenza reattiva induttiva, la rete è cioè per essa un carico ohmico-induttivo.
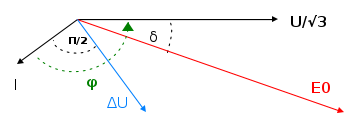
Ritardo e sottoeccitazione:
La corrente anticipa la tensione di rete di un angolo superiore a 90°. La potenza attiva è negativa come pure quella reattiva. La macchina è dunque per la rete un motore che necessita anche di potenza induttiva.
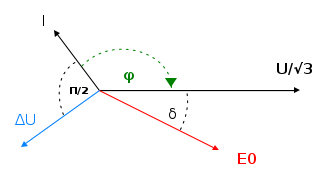
Ritardo e sovraeccitazione:
La corrente ritarda sulla tensione di rete di un angolo maggiore di 90°. La potenza attiva è negativa (funzionamento come motore) mentre la potenza reattiva è positiva. La macchina è dunque per la rete un carico ohmico capacitivo. Per la macchina la rete è un generatore di potenza attiva cui essa eroga potenza induttiva.
Anticipo e sottoeccitazione 
La corrente è in anticipo sulla tensione di rete, la potenza attiva è positiva, quella reattiva negativa.
La macchina immette in rete potenza attiva ma richiede potenza induttiva.
Conclusione
La macchina sincrona in parallelo alla rete può dunque funzionare sia come generatore di potenza attiva, sia come motore, con possibilità, in entrambi i casi, di regolazione della potenza reattiva.
Tutte le precedenti situazioni possono essere raggruppate in un unico diagramma polare, evidenziando anche i limiti imposti alla potenza erogabile per ragioni termiche e di stabilità di funzionamento (curve di capability).
E' quanto vedremo in un prossimo articolo.



 ... Grazie.
... Grazie.