
 Elettrotecnica e non solo (admin)
Elettrotecnica e non solo (admin) Un gatto tra gli elettroni (IsidoroKZ)
Un gatto tra gli elettroni (IsidoroKZ) Esperienza e simulazioni (g.schgor)
Esperienza e simulazioni (g.schgor) Moleskine di un idraulico (RenzoDF)
Moleskine di un idraulico (RenzoDF) Il Blog di ElectroYou (webmaster)
Il Blog di ElectroYou (webmaster) Idee microcontrollate (TardoFreak)
Idee microcontrollate (TardoFreak) PICcoli grandi PICMicro (Paolino)
PICcoli grandi PICMicro (Paolino) Il blog elettrico di carloc (carloc)
Il blog elettrico di carloc (carloc) DirtEYblooog (dirtydeeds)
DirtEYblooog (dirtydeeds) Di tutto... un po' (jordan20)
Di tutto... un po' (jordan20) AK47 (lillo)
AK47 (lillo) Esperienze elettroniche (marco438)
Esperienze elettroniche (marco438) Telecomunicazioni musicali (clavicordo)
Telecomunicazioni musicali (clavicordo) Automazione ed Elettronica (gustavo)
Automazione ed Elettronica (gustavo) Direttive per la sicurezza (ErnestoCappelletti)
Direttive per la sicurezza (ErnestoCappelletti) EYnfo dall'Alaska (mir)
EYnfo dall'Alaska (mir) Apriamo il quadro! (attilio)
Apriamo il quadro! (attilio) H7-25 (asdf)
H7-25 (asdf) Passione Elettrica (massimob)
Passione Elettrica (massimob) Elettroni a spasso (guidob)
Elettroni a spasso (guidob) Bloguerra (guerra)
Bloguerra (guerra)
Indice |
Abstract
In questo articolo mi propongo di sviluppare formalmente un processo per la determinazione dell'evoluzione temporale di circuiti dinamici, postulando solamente il Principio di minima azione di Hamilton. L'articolo è destinato a tutti coloro che abbiano buone basi di analisi 1 e 2, fisica ed elettrotecnica. Non è necessaria alcuna conoscenza di calcolo delle variazioni e di meccanica razionale. Anche se tali conoscenze gioverebbero alla lettura.
Calcolo delle variazioni
Di seguito sono presentati alcuni elementi di calcolo delle variazioni, essenziali per la derivazione della teoria dal Principio di minima azione. Questo paragrafo è necessario dal momento che tali argomenti, non vengono trattati in un normale corso di laurea triennale in ingegneria elettrica o elettronica, i cui studenti sono di fatto il target di questo articolo. Chi è già ferrato in questi argomenti può agevolmente saltare oltre.
Lemma fondamentale del calcolo variazionale
Enunciato
Sia ![V=\left \{ v \in C^1[a,b] : v(a)=v(b)=0 \right \}](/mediawiki/images/math/9/f/e/9fe766fd1e24cf724f04efabb5794725.png) , l'insieme delle funzioni a derivata continua in [a,b] che si annullano agli estremi. Allora
, l'insieme delle funzioni a derivata continua in [a,b] che si annullano agli estremi. Allora

implica

per ogni x in [a,b].
Dimostrazione
Per assurdo, si supponga  per qualche
per qualche ![x \in [a,b]](/mediawiki/images/math/8/2/9/8290bddba5acf9822dcbf61f4ac67d1b.png) .
.
Allora senza perdita di generalità possiamo dire che esiste ![x_0 \in [a,b]](/mediawiki/images/math/0/2/5/0256d46865eafa8df913009bb4f1d987.png) tale che f(x0) > 0.
tale che f(x0) > 0.
Per continuità esisterà un δ > 0 tale per cui  per ogni
per ogni ![x \in [x_0-\delta,x_0+\delta].](/mediawiki/images/math/c/f/c/cfc7e3123a9d0cd01c45642a196b3bbd.png) Si consiglia di ragionare sulla figura 1 per prender coscienza di questo fatto.
Si consiglia di ragionare sulla figura 1 per prender coscienza di questo fatto.
Ipotizzando f(x0) > 0 non perdiamo la generalità perché se avessimo assunto f(x0) < 0, sarebbe stato sufficiente invertire i versi delle disuguaglianze ottenendo una dimostrazione del tutto equivalente [6]. Ma a rigor di logica sarebbe da dimostrare anche ciò.
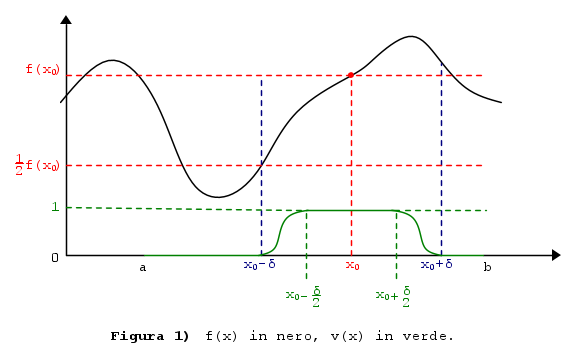
Ora scegliamo una v(x) con le seguenti caratteristiche:
- v(x) = 1 per ogni
![x \in \left [x_0-\delta/2,x_0+\delta/2 \right ]](/mediawiki/images/math/8/3/f/83f5ef854ffd51152bd2144b59594b51.png)
- 0 < v(x) < 1 per ogni

- v(x) = 0 altrimenti.
- e naturalmente v deve essere in V.
Potete osservare un esempio di grafico di v(x) con queste caratteristiche in figura 1.
Per come abbiamo costruito v(x) è banale l'uguaglianza

Un po' meno facile è convincersi della seguente disuguaglianza, ma con l'aiuto della figura 2, che non ha alcuna pretesa di esattezza, non dovrebbe essere complicato accettare la disuguaglianza.

Qualche commento d'ausilio per il disegno di f(x)v(x):
- Essendo 0 < v(x) < 1 in
![[x_0-\delta,x_0-\delta/2] \cup [x_0+\delta/2,x_0+\delta]](/mediawiki/images/math/8/c/9/8c9bc85d35a0f51c6b55a5c78cbe4e99.png) , allora f(x)v(x) < f(x) nello stesso insieme.
, allora f(x)v(x) < f(x) nello stesso insieme.
- Mentre f(x)v(x) = f(x) per ogni .
- Naturalmente f(x)v(x) è identicamente nulla altrove.
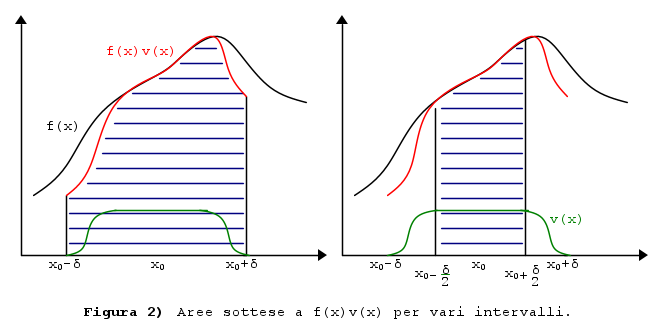
Per finire abbiamo che l'integrale di sinistra è sicuramente maggiore dell'aria del rettangolo  , che è strettamente maggiore di zero.
, che è strettamente maggiore di zero.

Collegando le disuguaglianze si ha:
 In palese contraddizione con le ipotesi, quindi l'assunto per qualche x, non può che essere sbagliato.
In palese contraddizione con le ipotesi, quindi l'assunto per qualche x, non può che essere sbagliato.
Banalmente f(x) = 0 per ogni x nell'intervallo [a,b].
Metodo della perturbazione verticale
Sia ![Y \subset C^{2}[a,b]](/mediawiki/images/math/2/1/3/2138a7eb211d7b916a4c99e5ee1508cf.png) .
.
Sia  , con minimo in
, con minimo in  .
.
Allora banalmente

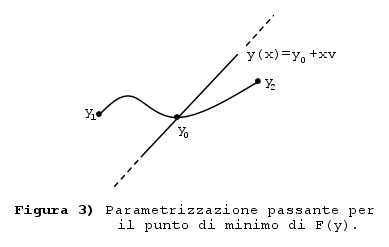
Scegliamo y(x) = y0 + xv, come la retta passante per il punto di minimo di F(y) e direzione ![v \in C^1[a,b]](/mediawiki/images/math/9/5/f/95f583b41c91209bbcf5fac5d94719f8.png) , dove
, dove ![x \in [-\delta,\delta]](/mediawiki/images/math/c/f/d/cfdbfdfc8c95c2a6c869ed67368d4325.png) con δ > 0 .
con δ > 0 .
allora si avrà

essendo y(0) = y0. In altri termini, affinché y0 sia punto di minimo per F(y), tutte le derivate direzionali di F(y) devono essere nulle in y0 (Condizione necessaria) [6][4][1] .
Lagrangiana circuitale
Prima di definire la lagrangiana è utile ricordare alcuni risultati di fisica 2, [3].
L'energia immagazzinata nel campo elettrico di un condensatore è

Dove q = q(t) è la quantità di carica in funzione del tempo.
L'energia immagazzinata immagazzinata nel campo magnetico di un induttore è

Nel seguito utilizzerò indiscriminatamente notazione di Newton e Leibniz per indicare le derivare temporali.
Assumiamo l'energia erogata da un generatore di tensione con la convenzione dei generatori essere

mentre con la convenzione degli utilizzatori

Queste ultime due relazioni derivano dalla definizione operativa di differenza di potenziale elettrico.
Ora definiamo la lagrangiana di un circuito come la differenza tra l'energia magnetica (T), immagazzinata negli induttori e l'energia potenziale elettrica (V), immagazzinata nei condensatori ed erogata dai generatori [9].

Esempi
Prima di procedere esaminiamo alcuni semplici circuiti e scriviamo le lagrangiane associate.
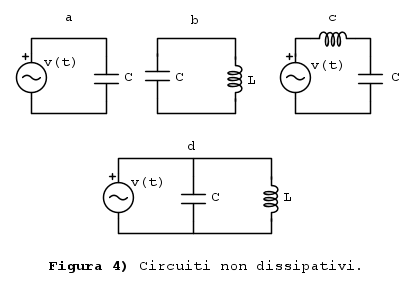
I primi tre casi sono banali:



Il circuito d ha due maglie, questo vuol dire che il numero di correnti linearmente indipendenti è 2. In termini meccanici, diremmo che il circuito ha due gradi di libertà.
Scegliamo come variabili di stato [5], la carica del condensatore qc e l'integrale della corrente che attraversa l'induttore nell'intervallo di tempo qL.

Gradi di libertà
Si definisce: numero di gradi di libertà di un circuito, il massimo numero delle correnti linearmente indipendenti.
In termini rigorosi, se K è la matrice che rappresenta le KCL, allora il numero di maglie fondamentali è
f = rango(K).
Segue un esempio,
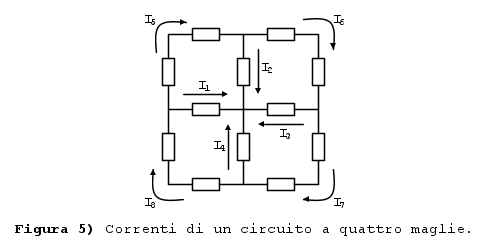
La KCL del circuito in figura 5 è

Il rango di K è 3, quindi f=3. Ai fini pratici è utile scegliere un numero di variabili di stato, pari al numero delle finestre [7].
Si osservi che la scelta delle variabili di stato q1,q2,...,qf è di per se una codifica della KCL. Come si osserva nell'esempio di figura 4d.
Il principio di minima azione
Il principio di minima azione di Hamilton, che riveste il ruolo di unico assioma della nostra teoria analitica dei circuiti, verrà formulato in un linguaggio famigliare all'ambiente elettrotecnico. Tuttavia esso è un principio molto più generale, in altra sede si possono trovare formulazioni generalizzate del principio, o più comunemente nell'ambito della meccanica [1][2][11].
Enunciato
L'evoluzione temporale di un circuito dinamico non dissipativo a singola maglia, è un punto di minimo del funzionale azione  , per piccole variazioni della carica q(t).
, per piccole variazioni della carica q(t).
![\mathcal{S}[q] \ \stackrel{\mathrm{\Delta}}{=}\ \int_{t_1}^{t_2} \mathcal L(q(t),\dot{q}(t),t)\, \operatorname dt](/mediawiki/images/math/8/6/1/861ba6c63298614b318842b165d6ca6f.png)
dove  denota la lagrangiana circuitale, presentata nel paragrafo precedente.
denota la lagrangiana circuitale, presentata nel paragrafo precedente.
Soluzione del problema variazionale
Perturbiamo verticalmente la quantità di carica in funzione del tempo, attorno al punto stazionario dell'azione q0(t).
q(t,α) = q0(t) + αv(t) = q(t,0) + αv(t)
dove v è a deriva prima continua ed è nulla agli estremi v(t1) = v(t2) = 0 .
![\mathcal{S}[q(t,\alpha)] = \int_{t_1}^{t_2} \mathcal L(q(t,\alpha),\dot{q}(t,\alpha),t)\, \operatorname dt](/mediawiki/images/math/e/1/b/e1b06b64006b7e45192ea8183d7b5f89.png)
Calcoliamone la derivata prima alla ricerca dei punti stazionari.

Integrando per parti il secondo termine

Essendo v(t1) = v(t2) = 0. Sostituendo questo risultato nella precedente

Per per i fatti discussi in Metodo della perturbazione verticale

E per il Lemma fondamentale del calcolo delle variazioni

Che prende il nome di equazione di Eulero-Lagrange del secondo tipo in forma differenziale [6][1][2].
In altri termini, si è dimostrato che affinché una certa quantità carica q0(t) minimizzi l'azione allora essa deve rispettare l'equazione di Eulero-Lagrange.
Equazione di Eulero-Lagrange
Per famigliarizzare con il risultato ottenuto, si applichi l'equazione di Eulero-Lagrange ai circuiti a,b e c, di figura 4 di cui già si conoscono le lagrangiane circuitali.
La carica che minimizza l'azione del circuito a deve soddisfare l'equazione di Eulero-Lagrange. Calcolando

da cui si ottiene

che è la ben nota relazione caratteristica del condensatore. Notare che il termine  rappresenta la differenza di potenziale ai capi del condensatore.
rappresenta la differenza di potenziale ai capi del condensatore.
Per il circuito b

ossia l'equazione dell'oscillatore armonico non smorzato.
Si noti che il termine  dell'equazione di Eulero-Lagrange rappresenta la differenza di potenziale autoindotta ai capi dell'induttore.
dell'equazione di Eulero-Lagrange rappresenta la differenza di potenziale autoindotta ai capi dell'induttore.
Per finire, calcolando la carica che minimizza l'azione di  si ha
si ha

la classica equazione del moto armonico forzato, non smorzato.
Da quest'ultimo esempio si osserva che in un circuito mono maglia, il minimo dell'azione si ha per quella q(t) che rispetta la KVL alla maglia.
Eulero-Lagrange multi maglia
Si vuole ora generalizzare l'equazione di Eulero-Lagrange a circuiti multi maglia, dagli esempi precedenti si deduce che l'equazione codifica la KVL alla maglia.
Inoltre si è già constatato che la KCL è codificata nella scelta delle variabili di stato, q1,q2,...,qf.
Risultato della teoria dei grafi [7] è che un circuito con f maglie fondamentali ha f equazioni alle tensioni linearmente indipendenti.
Quindi se il circuito ha f maglie fondamentali (gradi di libertà) allora dovremmo risolvere un sistema di f equazioni che soddisfano l'equazione di Eulero-Lagrange.

Questo risultato è di fatto direttamente derivabile dal principio di minima azione [1][2], assumendo la lagrangiana come funzione di ![\mathbf q = [q_1, q_2, ..., q_f]](/mediawiki/images/math/b/a/8/ba838dcccd7aec6c7509526903cf5d86.png) .
.
Ora si hanno tutti gli elementi per calcolare le equazioni che modella il circuito figura 4d. Nota la lagrangiana circuitale, determinare l'equazione differenziale è un processo piuttosto meccanico.


Da cui si ottengono le due equazioni


Potenziale di Rayleigh
Volendo includere nella formulazione analitica della teoria dei circuiti, le cadute di tensione dovute ad elementi resistivi, si incontrano non pochi problemi. La lagrangiana di un circuito dinamico è una misura del bilancio tra energia magnetica ed energia elettrica. Ovviamente gli elementi resistivi non possono rientrare in questo bilancio, essendo causa di fenomeni irreversibili (dissipazione termica).
Si consideri la seguente generalizzazione dell'equazione di Eulero-Lagrange:

Dove  è una funzione della variabile
è una funzione della variabile  detta, potenziale di Rayleigh.
detta, potenziale di Rayleigh.
Derivare questa generalizzazione dal principio di minima azione è un po macchinoso. Tuttavia è possibile [10]. Invece considerando la tensione che si instaura tra i capi di una resistenza attraversata da corrente, come una tensione esterna, si può introdurre in maniera piuttosto naturale il termine dissipativo [1].
Il potenziale di Rayleigh [1] ha la seguente forma

Si consideri il semplice circuito
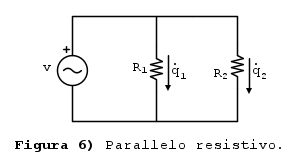
Allora


Da cui si ricavano le equazioni


Ossia la legge di Ohm per le due resistenze.
Un caso concreto
Si consideri il circuito dinamico in figura 7
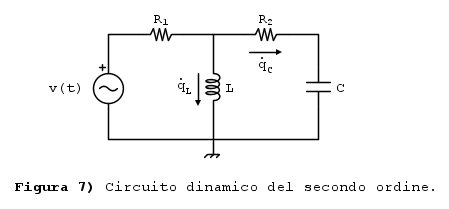
Il circuito ha due maglie fondamentali, è necessario scegliere due variabili di stato. Una possibile scelta di variabili è ![\mathbf q = [q_L q_c].](/mediawiki/images/math/5/b/e/5bebd08e782eb09bbbdfb3bb2872e2ac.png)
La lagrangiana circuitale è

Mentre il potenziale di Rayleigh è

Da cui si ricavano le equazioni che minimizzano l'azione


Conclusioni ed auspici
Come si è visto, l'equazione di Eulero-Lagrange è un potente strumento per la modellazione di circuiti dinamici. Essa è del tutto equivalente alle leggi di Kirchhoff. La KCL è equivalente alla scelta delle variabili di stato, mentre l'equazione di per se, codifica la KVL.
Questo riduce il problema elettrotecnico all'identificazione delle variabili di stato e la scrittura della funzione di Lagrange ed il potenziale di Rayleigh, che sono funzioni scalari. Il resto è semplice automatismo matematico facilmente implementabile in un qualsiasi CAS come Maxima o Mathematica.
Un'idea per un futuro articolo può essere: la sistematizzazione nella scelta delle variabili di stato, per mezzo del metodo delle correnti di maglia. Un tale algoritmo renderebbe piuttosto semplice l'implementazione di un modellatore di circuiti automatico, che dall'immagine del circuito, identifichi le finestre ed i componenti, per poi ottenere la lagrangiana circuitale e la funzione dissipativa.
Riferimenti
- Classical Mechanics : Herbert Goldstein, Charles P. Poole & John Safko
- Mechanics : L.D. Landau & E.M. Lifshitz
- Fundamentals of Electric Circuits : Charles Alexander & Matthew Sadiku
- Mathematical Analysis I : Vladimir A. Zorich
- Analisi dei Sistemi Dinamici : Alessandro Giua & Carla Seatzu
- Elementi di Calcolo delle Variazioni : Massimo Gobbino
- Teoria dei grafi : Alessandra Fanni
- Analytical Mechanics : Grzegorz Bąk
- Lagrangian description of electric circuits : Yasser Kadhim
- Is it possible to formulate least action principle for dissipative systems? : Qiuping A. Wang & Ru Wang
- Why the Principle of Least Action? : Jonathan Gleason, Mark Eichenlaub, ...




