
 Elettrotecnica e non solo (admin)
Elettrotecnica e non solo (admin) Un gatto tra gli elettroni (IsidoroKZ)
Un gatto tra gli elettroni (IsidoroKZ) Esperienza e simulazioni (g.schgor)
Esperienza e simulazioni (g.schgor) Moleskine di un idraulico (RenzoDF)
Moleskine di un idraulico (RenzoDF) Il Blog di ElectroYou (webmaster)
Il Blog di ElectroYou (webmaster) Idee microcontrollate (TardoFreak)
Idee microcontrollate (TardoFreak) PICcoli grandi PICMicro (Paolino)
PICcoli grandi PICMicro (Paolino) Il blog elettrico di carloc (carloc)
Il blog elettrico di carloc (carloc) DirtEYblooog (dirtydeeds)
DirtEYblooog (dirtydeeds) Di tutto... un po' (jordan20)
Di tutto... un po' (jordan20) AK47 (lillo)
AK47 (lillo) Esperienze elettroniche (marco438)
Esperienze elettroniche (marco438) Telecomunicazioni musicali (clavicordo)
Telecomunicazioni musicali (clavicordo) Automazione ed Elettronica (gustavo)
Automazione ed Elettronica (gustavo) Direttive per la sicurezza (ErnestoCappelletti)
Direttive per la sicurezza (ErnestoCappelletti) EYnfo dall'Alaska (mir)
EYnfo dall'Alaska (mir) Apriamo il quadro! (attilio)
Apriamo il quadro! (attilio) H7-25 (asdf)
H7-25 (asdf) Passione Elettrica (massimob)
Passione Elettrica (massimob) Elettroni a spasso (guidob)
Elettroni a spasso (guidob) Bloguerra (guerra)
Bloguerra (guerra)Per quelle che sono le risposte precedenti, e per quella che può essere la mia modesta opinione in proposito posso dirti che per il target hardware a disposizione potrebbe non essere semplice far generare una rampa ad "S" "accettabile" al PLC comunque interfacciato con il drive.
Se la soluzione che prevede la modulazione del profilo di rampa nel drive risultasse accettabile, allora il consiglio è quello di adottare tale soluzione anche per le macchine che utilizzano il PLC; sempre ammesso che si tratti di identico drive e che le configurazioni validate per lo stesso risultino adeguate anche per la seconda configurazione.
Soft Starting
Moderatori: ![]() dimaios,
dimaios, ![]() carlomariamanenti
carlomariamanenti
31 messaggi
• Pagina 3 di 4 • 1, 2, 3, 4
0
voti
[22] Re: Soft Starting
![]() da
da ![]() attiliovolpe » 16 apr 2013, 9:47
attiliovolpe » 16 apr 2013, 9:47
Capisco che è comunque una roba un po' complicata, capisco anche che se l'azionamento si gestisce la rampa da se con le impostazioni "di bordo" va anche meglio, ma esiste un blocco funzionale esempio per capire quanto sarebbe complicato farlo da S7?
Ciao
Ciao
-

 attiliovolpe
attiliovolpe
885 1 5 12 - Expert

- Messaggi: 156
- Iscritto il: 4 nov 2009, 23:44
1
voti
[23] Re: Soft Starting
![]() da
da ![]() carlomariamanenti » 16 apr 2013, 9:53
carlomariamanenti » 16 apr 2013, 9:53
Come ti hanno già risposto esiste un tool che deve essere acquistato a parte.
Comunque, come già descritto da altri in precedenza, per ottenere ciò che desideri sarebbe a mio parere consigliabile un target più "performante", leggi veloce, una connessione verso il campo anch'essa più veloce e magari la possibilità di poter disporre di un linguaggio di programmazione più "evoluto".
Il mio consiglio rimane quello di demandare il compito di modulare i profili di accelerazione e decelerazione al drive.
Comunque, come già descritto da altri in precedenza, per ottenere ciò che desideri sarebbe a mio parere consigliabile un target più "performante", leggi veloce, una connessione verso il campo anch'essa più veloce e magari la possibilità di poter disporre di un linguaggio di programmazione più "evoluto".
Il mio consiglio rimane quello di demandare il compito di modulare i profili di accelerazione e decelerazione al drive.
-

 carlomariamanenti
carlomariamanenti
60,1k 6 11 13 - G.Master EY

- Messaggi: 4324
- Iscritto il: 18 gen 2012, 10:44
0
voti
[24] Re: Soft Starting
![]() da
da ![]() mazekika » 16 apr 2013, 22:14
mazekika » 16 apr 2013, 22:14
Il ladder e' da principianti.
Molti lo detestano a prescindere appenana mettono mano a cose piu evolute, ma ha ovviamente dei limiti.
Per inteso non ho votato un bel niente, ma sono per la soluzione di carlomariamanenti.
Semplice pulita pratica.
Ovvvio che tutto poi si puo' fare, ma poi vacci tu a districare i problemi in Arabia, diagnosticando un blocco SLC.
Sai che dolori!
Molti lo detestano a prescindere appenana mettono mano a cose piu evolute, ma ha ovviamente dei limiti.
Per inteso non ho votato un bel niente, ma sono per la soluzione di carlomariamanenti.
Semplice pulita pratica.
Ovvvio che tutto poi si puo' fare, ma poi vacci tu a districare i problemi in Arabia, diagnosticando un blocco SLC.
Sai che dolori!
Gli ingegneri amano risolvere i problemi. Se non hanno problemi a portata di mano li creano subito.
(Scott Adams)
(Scott Adams)

1
voti
[25] Re: Soft Starting
![]() da
da ![]() Candy » 16 apr 2013, 22:19
Candy » 16 apr 2013, 22:19
E' indubbiamente tutto vero e, leggendo il thread nel suo complesso a me pare di intravedere:
1) L'utente non aveva epserienza di curva ad S configurate direttamente sull'inverter;
2) L'utente sperava di trovare una FC, tra le tante della biblioteca, per realizzare la curva S tramite PLC;
3) Dopo alcuni interventi ed essendosi reso conto della pià grande difficoltà di lavorare lato PLC ha optato per farsi spiegare o capire da se come ottenere la configurazione direttamente dall'inverter;
4) Io mi domando perché a questo punto ancora tanta reticenza nell'usare le rampe inverter anche dove sono controllati in rete dal PLC...
Ma sono solo mie ipotesi, nulla di più... Nel frattempo almeno io mi sono approfondito un argomento che avevo sempre trattato superficialmente.
Allora, ringrazio io.
1) L'utente non aveva epserienza di curva ad S configurate direttamente sull'inverter;
2) L'utente sperava di trovare una FC, tra le tante della biblioteca, per realizzare la curva S tramite PLC;
3) Dopo alcuni interventi ed essendosi reso conto della pià grande difficoltà di lavorare lato PLC ha optato per farsi spiegare o capire da se come ottenere la configurazione direttamente dall'inverter;
4) Io mi domando perché a questo punto ancora tanta reticenza nell'usare le rampe inverter anche dove sono controllati in rete dal PLC...
Ma sono solo mie ipotesi, nulla di più... Nel frattempo almeno io mi sono approfondito un argomento che avevo sempre trattato superficialmente.
Allora, ringrazio io.
-

 Candy
Candy
32,5k 7 10 13 - CRU - Account cancellato su Richiesta utente
- Messaggi: 10123
- Iscritto il: 14 giu 2010, 22:54
0
voti
[26] Re: Soft Starting
![]() da
da ![]() Candy » 16 apr 2013, 22:34
Candy » 16 apr 2013, 22:34
E' una polemica trita e ritrita. Il fatto è che ogni medaglia si porta appresso due facce. Ognuno sceglie quella che meglio gli si addice, accettando di convivere con l'altra.
Piuttosto, perché dimaios non ci fa una bella spiegazione semplificativa ma significativa sul jerk, prima che il thread muoia?
dimaios non ci fa una bella spiegazione semplificativa ma significativa sul jerk, prima che il thread muoia?
Piuttosto, perché
-
Candy
32,5k 7 10 13 - CRU - Account cancellato su Richiesta utente
- Messaggi: 10123
- Iscritto il: 14 giu 2010, 22:54
7
voti
[27] Re: Soft Starting
![]() da
da ![]() dimaios » 16 apr 2013, 23:37
dimaios » 16 apr 2013, 23:37
attiliovolpe ha scritto: ...capisco anche che se l'azionamento si gestisce la rampa da se con le impostazioni "di bordo" va anche meglio, ma esiste un blocco funzionale esempio per capire quanto sarebbe complicato farlo da S7?
Purtroppo è piuttosto complicato se lo vuoi fare bene.
La generazione della traiettoria ad "S" non è difficile a patto di considerare il jerk costante.
Se invece vuoi fare traiettorie ad "S" con jerk variabile la questione si complica non poco.
Il controllo si compone di due parti :
1. Generatore di traiettoria
2. Controllore di posizione
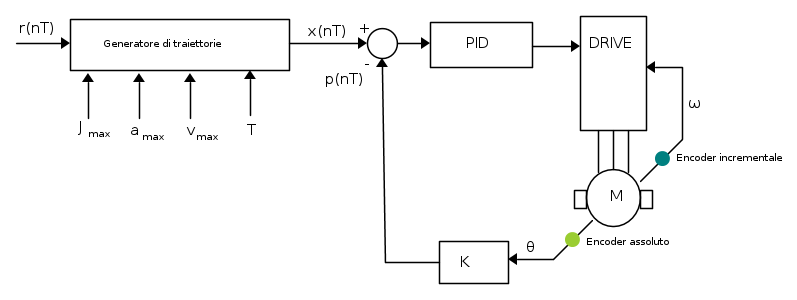
Il generatore di traiettorie è un blocco funzionale che ha in ingresso la traiettoria ideale desiderata
 ed in uscita produce una traiettoria x che soddisfa i vincoli cinematici.
ed in uscita produce una traiettoria x che soddisfa i vincoli cinematici.In questo caso si specificano :
1.
 : jerk massimo
: jerk massimo2.
 : accelerazione massima
: accelerazione massima3.
 : velocità massima
: velocità massima4.
 : Periodo di campionamento
: Periodo di campionamentoIn pratica si avrebbe un diagramma temporale tra grandezza ideale di riferimento e grandezza reale generata come quello indicato in figura :
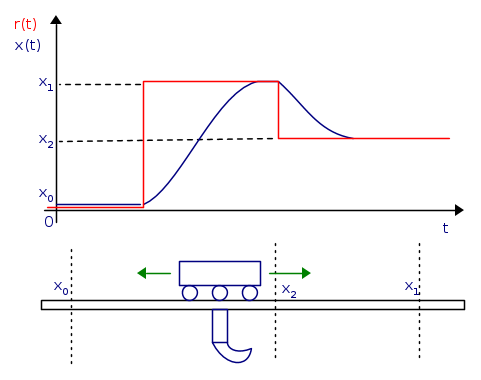
") ( in rosso = essendo la traiettoria desiderata varia repentinamente tra la posizione attuale e quella da raggiungere ( idealmente in tempo zero ).
( in rosso = essendo la traiettoria desiderata varia repentinamente tra la posizione attuale e quella da raggiungere ( idealmente in tempo zero ).A causa dei vincoli cinematici la traiettoria reale da seguire sarà
") che ovviamente segue con una certa dinamica il target .
che ovviamente segue con una certa dinamica il target .Mentre la limitazione della velocità e quella di accelerazione sono mediamente note il jerk è più insidioso.
Per comprenderne la natura fisica si può fare riferimento ad una repentina accelerata in automobile tale da "incollarvi" letteralmente al sedile.
Avendo a disposizione un motore con molti cavalli si riesce a passare molto velocemente da una accelerazione
 ad una accelerazione
ad una accelerazione  .
.Analogamente si ottiene una variazione di decelerazione violenta agendo sul freno prima dolcemente ( decelerazione ) e poi violentemente ( inchiodata di emergenza ).
La sensazione non è quella della semplice accelerazione che risulta continua e fluida ma si sente una discontinuità ... una variazione repentina di forza .... qualcosa che scuote.
Fisicamente questa grandezza è il jerk ed è il principale imputato nell'usura e rottura dei cinematismi a causa di sforzo ciclico a fatica ( l'esempio del pignone accoppiato ad una cremagliera è il più classico ).
Torniamo allo schema di principio iniziale.
Il segnale
deve essere confrontato con la posizione reale ") e l'errore pilota un controllore standard.
e l'errore pilota un controllore standard.L'anello per il controllo di velocità è sempre prerogativa del drive e deve essere piuttosto reattivo per consentire un agevole tuning dell'anello di posizione.
Le configurazioni standard sono le seguenti.
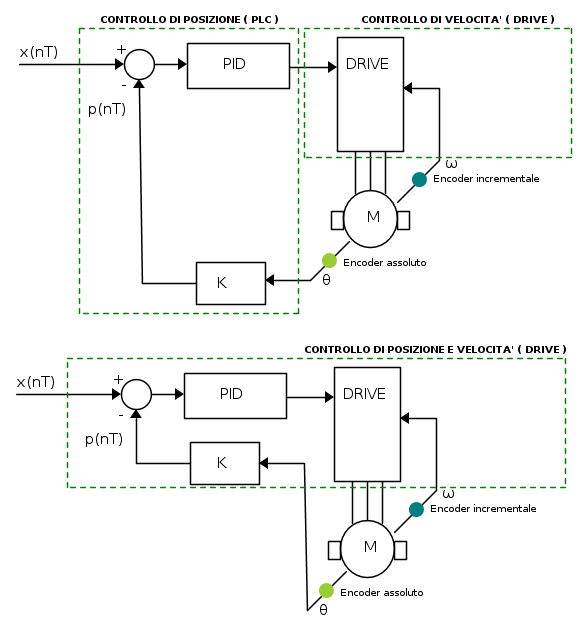
1. Il generatore di traiettorie ed il controllo di posizione sono a cura del PLC mentre il controllo di velocità è a cura del drive.
2. Il generatore di traiettorie è a cura del PLC mentre il controllo di posizione ed il controllo di posizione sono ambedue a cura del drive.
Usando i dovuti pacchetti tecnologici o versioni speciali dei drive si può addirittura inglobare il generatore di traiettorie nella logica di controllo dell'inverter.
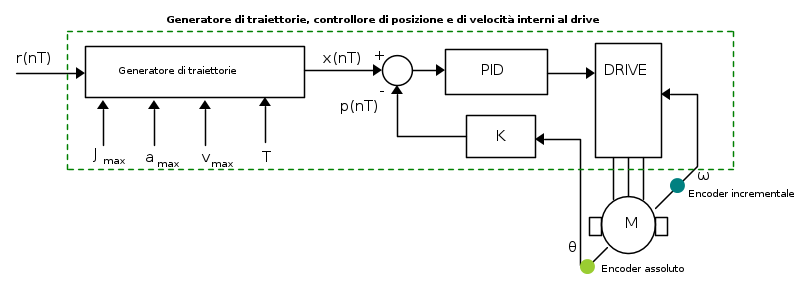
La scelta fra le 3 configurazioni dipende fondamentalmente dalla dinamica del sistema ed il tipo di azionamenti che si intende adottare.
Per un carroponte sono possibili tutte e tre ma se potessi scegliere adotterei la prima per i seguenti motivi.
1. Il generatore di traiettorie è riutilizzabile in tutte le situazioni indipendentemente dall'inverter e dal PLC ( ovviamente è necessario scriverlo in SCL per questioni di semplicità nella programmazione e di ricompilazione sulle varie piattaforme evitando la riscrittura completa ).
2. La parametrizzazione del drive riguarda solo il loop di velocità per cui risulta più semplice.
3. Non necessita l'acquisto di alcun pacchetto tecnologico aggiuntivo e know how da trasferire al cliente finale per la gestione del dispositivo
4. L'inverter è sostituibile con un altro senza preoccuparsi della parametrizzazione dei cicli esterni.
5. Maggior versatilità nel soddisfacimento delle varie vendor list in quanto il problema diventa parzialmente indipendente dal connubio PLC-Drive ovvero non ci si lega ad uno specifico generatore di traiettorie.
6. Essendo l'inverter privo di pacchetti aggiuntivi è più economico.
Quelle che ho citato sono configurazioni standard che rispettano la separazione dei vari livelli dell'automazione di livello L1.
1. Generatore di traiettorie
2. Controllore di posizione
3. Controllore di velocità
4. Controllore di corrente/coppia
Qualsiasi altra soluzione di tipo ibrido potrebbe funzionare ma genera accoppiamento tra i vari livelli.
Se per esempio si genera una traiettoria
con jerk non limitato e si cerca di limitarlo nel drive si impatta negativamente sulla taratura del controllore di posizione in quanto il setup risulta interno al loop in oggetto.Limitando il jerk al di fuori dell'anello di posizione il problema non si genera rendendo molto più semplice e gerarchico il commissioning iniziando dal ciclo più interno e procedendo verso i livelli superiori dell'automazione.
Ingegneria : alternativa intelligente alla droga.
-

dimaios
30,2k 7 10 12 - G.Master EY
- Messaggi: 3381
- Iscritto il: 24 ago 2010, 14:12
- Località: Behind the scenes
0
voti
[28] Re: Soft Starting
![]() da
da ![]() Candy » 16 apr 2013, 23:55
Candy » 16 apr 2013, 23:55
Ho cercato di essere il più attento possibile. Nelle tue spiegazioni hai usato l'encoder come elemento di chiusura dell'anello per il controllo delle traiettorie. Mi sorge un dubbio, o meglio una domanda: dal punto di vista del controllo della traiettoria con jerk costante, il feedback per la chiusura dell'anello, nello specifico caso, non potrebbe venire, (per quanto difficile), dall'analisi della forza motrice, (ovvero dalla corrente motore)?
In fin dei conti, jerk costante mi pare di capire significhi modulare l'accelerazione, (o decelerazione), per ridurre la parte di forza che andrebbe a scricarsi sulle componenti deteriorandole. Allora non sarebbe più proficuo rilevare la forza, piuttosto che la posizione?
In fin dei conti, jerk costante mi pare di capire significhi modulare l'accelerazione, (o decelerazione), per ridurre la parte di forza che andrebbe a scricarsi sulle componenti deteriorandole. Allora non sarebbe più proficuo rilevare la forza, piuttosto che la posizione?
-
Candy
32,5k 7 10 13 - CRU - Account cancellato su Richiesta utente
- Messaggi: 10123
- Iscritto il: 14 giu 2010, 22:54
4
voti
[29] Re: Soft Starting
![]() da
da ![]() dimaios » 17 apr 2013, 0:16
dimaios » 17 apr 2013, 0:16
Penso di aver compreso il dubbio e provo a dare una spiegazione.
Se vogliamo imporre una traiettoria ( si parla quindi di cinematica ) limitando il jerk mettiamo un tetto massimo a questa grandezza per preservare la meccanica.
La traiettoria che ne consegue, se fosse fedelmente seguita, garantirebbe il limite imposto al jerk e quindi gli sforzi dinamici.
Lo scopo quindi è seguire il più fedelmente possibile la traiettoria proposta dal generatore di traiettorie .... se ci riusciamo abbiamo ottenuto il risultato voluto ovvero non sollecitiamo la meccanica oltre i limiti.
Per ottenere un buon controllo di posizione bisogna assicurarsi di conoscere massa ed attrito dinamico del carico ed evitare che fenomeni esterni ( forze sconosciute ) agiscano repentinamente sul carico cambiando le caratteristiche del carico visto dal drive.
Nel caso di un carroponte queste grandezze sono note per cui si riesce a tarare i loop perché la traiettoria sia seguita in modo estremamente preciso ( in realtà si tara in maniera accettabile per avere un controllo adeguato nei casi limite di carroponte scarico e a massimo carico ).
Quando invece il carico è variabile a causa di forze esterne il discorso cambia completamente e bisogna adottare tecniche radicalmente diverse.
In robotica per esempio, grazie a sensori specifici ( di forza e posizione ) e controlli sofisticati si fa proprio quello che dicevi nel post precedente :
A) CONTROLLO PURO DI FORZA
B) CONTROLLO ATTIVO DI RIGIDEZZA
C) CONTROLLO DI IMPEDENZA MECCANICA
D) CONTROLLO IBRIDO DI POSIZIONE/FORZA
A seconda del tipo di controllo il robot reagisce in modo diverso con l'ambiente.
Se vogliamo imporre una traiettoria ( si parla quindi di cinematica ) limitando il jerk mettiamo un tetto massimo a questa grandezza per preservare la meccanica.
La traiettoria che ne consegue, se fosse fedelmente seguita, garantirebbe il limite imposto al jerk e quindi gli sforzi dinamici.
Lo scopo quindi è seguire il più fedelmente possibile la traiettoria proposta dal generatore di traiettorie .... se ci riusciamo abbiamo ottenuto il risultato voluto ovvero non sollecitiamo la meccanica oltre i limiti.
Per ottenere un buon controllo di posizione bisogna assicurarsi di conoscere massa ed attrito dinamico del carico ed evitare che fenomeni esterni ( forze sconosciute ) agiscano repentinamente sul carico cambiando le caratteristiche del carico visto dal drive.
Nel caso di un carroponte queste grandezze sono note per cui si riesce a tarare i loop perché la traiettoria sia seguita in modo estremamente preciso ( in realtà si tara in maniera accettabile per avere un controllo adeguato nei casi limite di carroponte scarico e a massimo carico ).
Quando invece il carico è variabile a causa di forze esterne il discorso cambia completamente e bisogna adottare tecniche radicalmente diverse.
In robotica per esempio, grazie a sensori specifici ( di forza e posizione ) e controlli sofisticati si fa proprio quello che dicevi nel post precedente :
A) CONTROLLO PURO DI FORZA
B) CONTROLLO ATTIVO DI RIGIDEZZA
C) CONTROLLO DI IMPEDENZA MECCANICA
D) CONTROLLO IBRIDO DI POSIZIONE/FORZA
A seconda del tipo di controllo il robot reagisce in modo diverso con l'ambiente.
Ingegneria : alternativa intelligente alla droga.
-
dimaios
30,2k 7 10 12 - G.Master EY
- Messaggi: 3381
- Iscritto il: 24 ago 2010, 14:12
- Località: Behind the scenes
2
voti
[30] Re: Soft Starting
![]() da
da ![]() carlomariamanenti » 17 apr 2013, 6:48
carlomariamanenti » 17 apr 2013, 6:48
Un plauso a dimaios per la breve ma efficace trattazione sul jerk: voti strameritati! 
Una personale nota riferita ai linguaggi di programmazione per PLC: a parte il target descritto in questo thread mi piace far notare che per la programmazione di PLC non esistono solamente i due linguaggi Ladder e Awl; per fortuna vi sono a disposizione molti altri linguaggi "evoluti" tra i quali anche il C che permettono la scrittura di algoritmi di controllo complessi e l'utilizzo di tutta la matematica del caso in modo semplice ed efficace.
Questo è chiaramente un mio pensiero che non vuole assolutamente nulla togliere ai due linguaggi di programmazione sopra citati che ben vengono sfruttati per applicazioni dove queste risorse non sono richieste in modo "importante".
Una personale nota riferita ai linguaggi di programmazione per PLC: a parte il target descritto in questo thread mi piace far notare che per la programmazione di PLC non esistono solamente i due linguaggi Ladder e Awl; per fortuna vi sono a disposizione molti altri linguaggi "evoluti" tra i quali anche il C che permettono la scrittura di algoritmi di controllo complessi e l'utilizzo di tutta la matematica del caso in modo semplice ed efficace.
Questo è chiaramente un mio pensiero che non vuole assolutamente nulla togliere ai due linguaggi di programmazione sopra citati che ben vengono sfruttati per applicazioni dove queste risorse non sono richieste in modo "importante".
-
carlomariamanenti
60,1k 6 11 13 - G.Master EY
- Messaggi: 4324
- Iscritto il: 18 gen 2012, 10:44
31 messaggi
• Pagina 3 di 4 • 1, 2, 3, 4
Torna a Automazione industriale ed azionamenti
Chi c’è in linea
Visitano il forum: Nessuno e 5 ospiti