
 Elettrotecnica e non solo (admin)
Elettrotecnica e non solo (admin) Un gatto tra gli elettroni (IsidoroKZ)
Un gatto tra gli elettroni (IsidoroKZ) Esperienza e simulazioni (g.schgor)
Esperienza e simulazioni (g.schgor) Moleskine di un idraulico (RenzoDF)
Moleskine di un idraulico (RenzoDF) Il Blog di ElectroYou (webmaster)
Il Blog di ElectroYou (webmaster) Idee microcontrollate (TardoFreak)
Idee microcontrollate (TardoFreak) PICcoli grandi PICMicro (Paolino)
PICcoli grandi PICMicro (Paolino) Il blog elettrico di carloc (carloc)
Il blog elettrico di carloc (carloc) DirtEYblooog (dirtydeeds)
DirtEYblooog (dirtydeeds) Di tutto... un po' (jordan20)
Di tutto... un po' (jordan20) AK47 (lillo)
AK47 (lillo) Esperienze elettroniche (marco438)
Esperienze elettroniche (marco438) Telecomunicazioni musicali (clavicordo)
Telecomunicazioni musicali (clavicordo) Automazione ed Elettronica (gustavo)
Automazione ed Elettronica (gustavo) Direttive per la sicurezza (ErnestoCappelletti)
Direttive per la sicurezza (ErnestoCappelletti) EYnfo dall'Alaska (mir)
EYnfo dall'Alaska (mir) Apriamo il quadro! (attilio)
Apriamo il quadro! (attilio) H7-25 (asdf)
H7-25 (asdf) Passione Elettrica (massimob)
Passione Elettrica (massimob) Elettroni a spasso (guidob)
Elettroni a spasso (guidob) Bloguerra (guerra)
Bloguerra (guerra)
In un recente post [1] MarcoD domandava quali fossero i criteri di dimensionamento del filtro LC di un convertitore Buck in una applicazione particolare. Mentre i normali convertitori a commutazione sono progettati per lavorare con tensione di ingresso variabile e devono mantenere la tensione di uscita fissa, anche con carico variabile, in questa applicazione con celle Peltier, la tensione di ingresso è costante, come pure il carico resistivo, ma si deve poter variare la tensione di uscita e di conseguenza la corrente sul carico.
Questo articoletto non è un vero rapporto di progetto ma sono semplicemente le note di "brutta copia" che normalmente scriverei sul retro di una busta (back-of-the-envelope calculations). Suppongo che chi legge sappia come funziona un Buck, per cui ci saranno solo brevi richiami alla teoria del circuito.
Indice |
Introduzione
Uno dei convertitori più flessibili e versatili è il convertitore Buck o step-down, detto anche chopper. Questo convertitore ha svariate buone proprietà quali facilità di controllo e possibilità di utilizzo in un campo enorme di potenze, dalla frazione di watt alla decina di megawatt!
Nella sua implentazione più comune, Fig. 1, il circuito presenta un interruttore in posizione hi-side, quindi un pochino più complicato da pilotare rispetto a un interruttore riferito a ground.

L'applicazione analizzata in questo articolo è l'alimentazione di celle Peltier per un sistema raffreddante. La differenza rispetto a un normale applicazione di un convertitore Buck è che questa applicazione ha il carico  costante come pure la tensione di ingresso
costante come pure la tensione di ingresso  , mentre deve essere variata la tensione di uscita
, mentre deve essere variata la tensione di uscita  variando il duty cycle
variando il duty cycle  , e di conseguenza anche la corrente di uscita
, e di conseguenza anche la corrente di uscita  . La tensione di uscita deve poter essere variata fra zero e .
. La tensione di uscita deve poter essere variata fra zero e .
In questa applicazione il controllo viene fatto misurando la temperatura del sistema, che risponde con costanti di tempo enormemente più lunghe rispetto al periodo di commutazione, mentre non è richiesto avere una retroazione dalla tensione di uscita. Questo permette di modificare il circuito portando l'interruttore in posizione lo-side, come mostrato in Fig. 2.
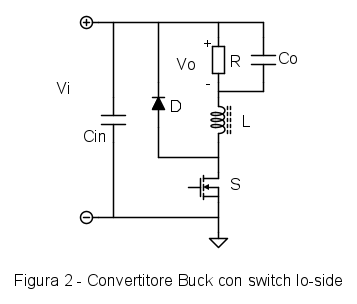
Le proprietà di questo circuito sono esattamente quelle del Buck standard, anche perché è un Buck solo disegnato in un altro modo, ma presenta lo switch riferito a ground, quindi più facile da pilotare. Inoltre il carico è ancora collegato a un potenziale fisso, in questo caso il positivo dell'ingresso, quindi la tensione di modo comune sul carico è costante e non ci sono problemi di compatibilità elettromagnetica.
Equazioni di progetto
I convertitori a commutazione possono essere progettati per funzionare in modo continuo, CCM, in cui la corrente dell'induttore non va mai a zero e in modo discontinuo, DCM, in cui la corrente va a zero alla fine di ogni ciclo, come mostrato in Fig. 3.
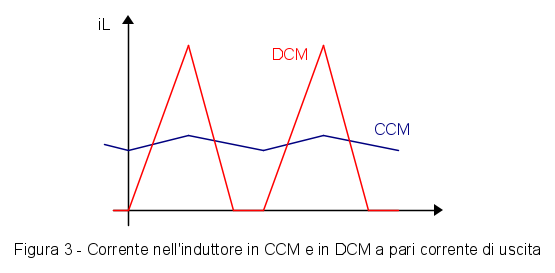
La differenza di comportamento fra i due modi è sostanziale. In DCM la corrente di picco è almeno doppia rispetto al funzionamento in CCM, inoltre in CCM il convertitore si comporta per se come una buona sorgente di tensione. In generale si cercherebbe di far lavorare un convertitore in CCM, ma in alcuni casi il legame dinamico fra tensione di uscita e duty cycle in CCM fa sì che il convertitore sia molto difficile o impossibile da controllare, per cui si è costretti a progettare il convertitore in DCM.
Nel caso del Buck si è fortunati, perché è facile controllarlo e addirittura in questo caso il controllo sulla tensione di uscita non è necessario perché anche staccando il carico la tensione di uscita non diverge, come invece capita con altre topologie.
Le equazioni di progetto permettono di calcolare il valore dell'induttanza e gli stress elettrici dei componenti, così da poterli selezionare in fase di progetto. Nel seguito si useranno le equazioni ricavate per componenti ideali. Nel caso di componenti reali le variazioni dei risultati sono sufficientemente piccole per cui non vale la pena di sviluppare equazioni più complicate e sostanzialmente poco utili. Si supporrà anche di lavorare a frequenza di commutazione costante  , come capita nella grande maggioranza dei casi, e sempre quando il convertitore è controllato da un microcontrollore.
, come capita nella grande maggioranza dei casi, e sempre quando il convertitore è controllato da un microcontrollore.
Le equazioni fondamentali in CCM, che non cambiano anche quando si lavora a tensione di ingresso fissa e tensione di ucita variabile sono il legame fra tensione di ingresso e uscita

in cui si vede che la tensione di uscita dipende linearmente dal duty cycle, e può variare da zero, con duty cycle nullo e quindi interruttore sempre aperto, a un valore pari alla tensione di ingresso quando il duty cycle è pari a uno, quindi interruttore costantemente chiuso.
La seconda equazione invariante è quella che definisce l'induttanza critica, cioè quel valore di induttanza che porta il convertitore a lavorare sul confine fra modo continuo e modo discontinuo

Per rimanere in modo continuo l'induttanza deve essere maggiore di quella critica nel caso più sfavorevole, come sarà mostrato nella prossima sezione.
La formula (2) è l'unica relazione che fornisce il valore di un componente, gli altri componenti vengono scelti in base agli stress elettrici che debbono sopportare o in base ai loro parametri parassiti. È quindi necessario trovare gli stress di tensione e corrente dei vari componenti. Per questo scopo bisogna trovare i valori di picco della corrente nell'induttore, riferendo questi valori alla tensione di ingresso (costante) e al duty cycle.
In Fig. 4 è rappresentata la corrente di induttore di un Buck in modo continuo, con la pendenza delle rampe di salita e discesa. La corrente di uscita  è il valor medio della corrente nell'induttore.
è il valor medio della corrente nell'induttore.
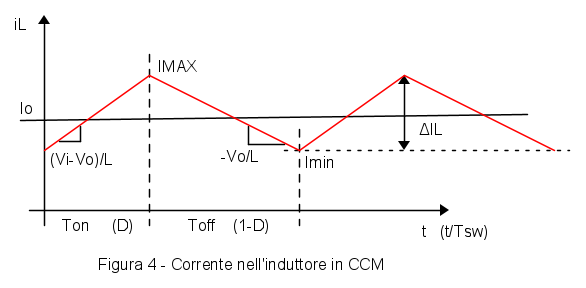
La pendenza delle correnti nell'induttore è valutata trascurando le resistenze parassite e le cadute sull'interruttore e sul diodo. Se si volessero includere anche le cadute di tensione sui semiconduttori, le due pendenze risulterebbero rispettivamente pari a  e
e  con l'effetto di ridurre la pendenza della salita e aumentare quello della discesa di corrente.
L'effetto delle perdite è minuscolo e se si considerassero le formule risultanti sarebbero inutilmente complicate.
con l'effetto di ridurre la pendenza della salita e aumentare quello della discesa di corrente.
L'effetto delle perdite è minuscolo e se si considerassero le formule risultanti sarebbero inutilmente complicate.
I valori di  e
e  vengono ricavati imponendo che la variazione di corrente in salita sia uguale a quella in discesa e uguale a
vengono ricavati imponendo che la variazione di corrente in salita sia uguale a quella in discesa e uguale a  e che la corrente media dell'onda triangolare sia pari alla corrente di uscita .
e che la corrente media dell'onda triangolare sia pari alla corrente di uscita .


Risolvendo il sistema delle equazioni (3) e portando tutto in funzione di e
si ottiene


e il ripple picco-picco della corrente nell'induttore vale

Le equazioni da (3) a (5) sono essenzialmente le relazioni diverse da quelle standard che devono essere usate per il progetto del Buck usato a tensione di uscita variabile.
Per calcolare lo stress sui componenti servono essenzialmente le correnti, in qualche caso il valore di picco, in altri quello medio e in altri ancora quello efficace. Si parte identificando le correnti che interessano, in particolare quella attraverso l'interruttore  , attraverso il diodo
, attraverso il diodo  e i condensatori di ingresso
e i condensatori di ingresso  e uscita
e uscita  .
.
In Fig. 5 sono riportate le forme d'onda che servono, ricavate dalla corrente attraverso l'induttore.
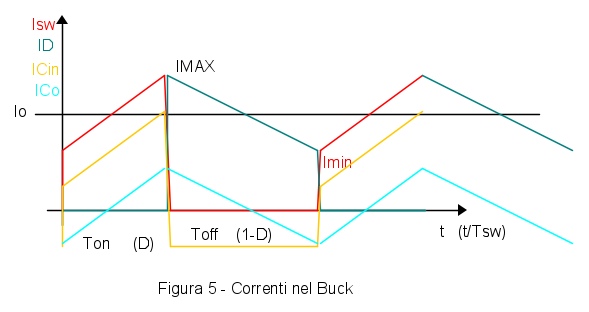
In particolare la corrente dell'interruttore (traccia rossa) è uguale a quella dell'induttore durante l'intervallo  , oppure, se si usa il tempo normalizzato rispetto a
, oppure, se si usa il tempo normalizzato rispetto a  , bisogna considerare l'intervallo . La corrente attraverso il diodo (traccia blu) e` pari a quella dell'induttore durante la fase
, bisogna considerare l'intervallo . La corrente attraverso il diodo (traccia blu) e` pari a quella dell'induttore durante la fase  oppure
oppure  . Le correnti attraverso i condensatori di ingresso e di uscita sono rispettivamente pari a quella dell'interruttore depurata del suo valore medio (traccia gialla), mentre nel condensatore di uscita la corrente e` quella dell'induttore depurata del suo valore medio (traccia azzurra).
. Le correnti attraverso i condensatori di ingresso e di uscita sono rispettivamente pari a quella dell'interruttore depurata del suo valore medio (traccia gialla), mentre nel condensatore di uscita la corrente e` quella dell'induttore depurata del suo valore medio (traccia azzurra).
Correnti
Le correnti importanti per il dimensionamento dipendono dal componente. Se il componente ha un comportamento resistivo (ad esempio il MOS) oppure ha una resistenza parassita (ad esempio l'induttore o le  dei condensatori), lo stress è dato dalla corrente efficace poiché la potenza dissipata dipende dalla corrente efficace al quadrato. Invece se il componente ha un comportamento a tensione costante, ad esempio il diodo, si deve calcolare la corrente media, perché la potenza dissipata è appunto dato dal valor medio della corrente.
Per calcolare i valori efficaci delle onde trapezioidali si utilizza la flat top approximation, che consiste nell'approssimare il trapezio con un rettangolo con la stessa area e poi si calcola il valore efficace del rettangolo, molto più rapido da calcolare di quello del trapezio. L'errore commesso e` minimo!
dei condensatori), lo stress è dato dalla corrente efficace poiché la potenza dissipata dipende dalla corrente efficace al quadrato. Invece se il componente ha un comportamento a tensione costante, ad esempio il diodo, si deve calcolare la corrente media, perché la potenza dissipata è appunto dato dal valor medio della corrente.
Per calcolare i valori efficaci delle onde trapezioidali si utilizza la flat top approximation, che consiste nell'approssimare il trapezio con un rettangolo con la stessa area e poi si calcola il valore efficace del rettangolo, molto più rapido da calcolare di quello del trapezio. L'errore commesso e` minimo!
MOS
Il MOS in conduzione si comporta come una resistenza di valore  che dipende dalla
che dipende dalla  e dalla temperatura.
e dalla temperatura.
Il valore efficace della forma d'onda rossa di Fig. 5, usando l'approssimazione di flat top, vale

Il valore massimo di questa corrente si ha per  , mentre il valore di picco è ovviamente
, mentre il valore di picco è ovviamente  .
.
Diodo
Per il diodo i valori importanti sono la corrente media e la corrente di picco. Il valore medio della corrente blu di Fig. 5 vale

e il suo valore massimo si ha per  . mentre il valore di picco è di nuovo
. mentre il valore di picco è di nuovo
Induttore
La scelta dell'induttore richiede il valore della corrente di picco, legata alla saturazione del nucleo magnetico, e la corrente efficace per le perdite nel conduttore. Nei convertitori in CCM il ripple di corrente, che provoca potenza dissipata per perdite nel nucleo è praticamente ininfluente.
La corrente efficace nell'induttore si potrebbe calcolare con una formula abbastanza complicata, ma a tutti gli effetti può essere approssimata con la sua corrente media

La corrente di picco, ancora una volta, è pari a
Condensatore di uscita
Le correnti da specificare per il condensatore di uscita sono il valore efficace della corrente attraverso il condensatore, traccia azzurra di Fig. 5, e il valore picco picco della corrente.
Il valore efficace di un'onda triangolare a valor medio nullo e di ampiezza  vale
vale

L'ampiezza picco picco della corrente attraverso il condensatore di uscita è dato dall'equazione (5), cha ha la condizione di massimo per
Condensatore di ingresso
Un aspetto importante da tenere presente nel progetto è che il condensatore di ingresso  , essendo collegato direttamente all'interruttore
, essendo collegato direttamente all'interruttore  è soggetto ad un elevato stress di corrente, mentre il condensatore di uscita, alimentato dall'induttore
è soggetto ad un elevato stress di corrente, mentre il condensatore di uscita, alimentato dall'induttore  subisce uno stress molto minore.
subisce uno stress molto minore.
La corrente efficace che attraversa il condensatore di ingresso sembrerebbe complicata da calcolarsi perché la forma d'onda non è standard. Ovviamente non si può usare la legge di Kirchhoff sul nodo di ingresso per le correnti efficaci, in quanto l'operatore RMS non è lineare. Si può per usare una variante della KCL, detta KCL quadratica che si applica ai valori efficaci. Applicata a questo caso si ha  da cui
da cui

IL massimo di questa espressione si ha per  Nel condensatore di ingresso il valore picco picco della corrente non è importante.
Nel condensatore di ingresso il valore picco picco della corrente non è importante.
Tensioni
Per i semiconduttori e i condensatori sono importanti anche le tensioni massime che si trovano a sopportare. In questo caso non ci sono particolari problemi. Il condensatore di ingresso, il MOS e il diodo sono sempre sottoposti alla tensione di ingresso mentre il condensatore di uscita ha ai suoi capi una tensione varibile, che puo` arrivare al valore della tensione di ingresso. Quindi tutti i componenti devono essere dimensionati per sopportare almeno .
Progetto
Dopo aver ricavato l'equazione di progetto e quelle di stress dei componenti si può passare al dimensionamento del circuito che deve soddisfare i seguenti requisiti:
- Tensione di ingresso costante pari a

- Carico costante con valore

- Tensione di uscita variabile con il duty cycle
 . La tensione nulla in uscita si ottiene tenendo continuamente spento il transistore, la tensione massima, quasi uguale a Vi la si ottiene tenendo acceso continuamente l'interruttore.
. La tensione nulla in uscita si ottiene tenendo continuamente spento il transistore, la tensione massima, quasi uguale a Vi la si ottiene tenendo acceso continuamente l'interruttore.
- Ripple picco picco della tensione di uscita, supponiamo
 della tensione di uscita massima, quindi
della tensione di uscita massima, quindi  .
.
Il progetto di un Buck è praticamente sempre fatto in modo continuo, riducendo gli stress di corrente e avendo una tensione di uscita ad anello aperto ben regolata, di valore

Come si vede dalle equazioni della sezione precedente, compare spesso il prodotto  che impica che si può scegliere più o meno liberamente uno di questi due parametri e l'altro viene determinato di conseguenza. Di solito la scelta iniziale è sulla frequenza di commutazione, tenendo presente che maggiore è la frequenza minore è il valore dell'induttanza, ma con la frequenza crescono anche le perdite di commutazione.
che impica che si può scegliere più o meno liberamente uno di questi due parametri e l'altro viene determinato di conseguenza. Di solito la scelta iniziale è sulla frequenza di commutazione, tenendo presente che maggiore è la frequenza minore è il valore dell'induttanza, ma con la frequenza crescono anche le perdite di commutazione.
Di solito la scelta è fatto a buon senso e in base all'esperienza, ma in questo caso esiste un vincolo ulteriore che è dato dal voler utilizzare un microcontrollore per la generazione del segnale di comando in PWM. Il microcontrollore in questione, ATMega328 può generare una frequenza massima di PWM pari a  , un po' bassa per questi livelli di potenza, ma comunque non disprezzabile e sicuramente utilizzabile. Il contatore che genera il segnale PWM ha una larghezza di 8 bit, e riesce quindi a generare 256 diversi valori di durata dell'impulso, una risoluzione ampiamente sufficiente per il controllo delle Peltier.
, un po' bassa per questi livelli di potenza, ma comunque non disprezzabile e sicuramente utilizzabile. Il contatore che genera il segnale PWM ha una larghezza di 8 bit, e riesce quindi a generare 256 diversi valori di durata dell'impulso, una risoluzione ampiamente sufficiente per il controllo delle Peltier.
Induttore
Il primo componente da dimensionare è l'induttore, poiché dal suo valore dipende il ripple di corrente e quindi gli stress di picco.
Avendo scelto la frequenza di commutazione, la sola equazione di progetto del Buck è la (2) che permette di calcolare il valore dell'induttore. Volendo lavorare in modo continuo bisogna mettersi nel caso in cui il valore di  è massimo e poi scegliere un valore
è massimo e poi scegliere un valore  . Nella formula (2) entrano in gioco la resistenza di uscita, costante, la frequenza di commutazione, già scelta e il duty cycle, che può variare fra 0 e 1. Per massimizzare il valore di si considera il caso di
. Nella formula (2) entrano in gioco la resistenza di uscita, costante, la frequenza di commutazione, già scelta e il duty cycle, che può variare fra 0 e 1. Per massimizzare il valore di si considera il caso di


Poiché l'induttanza effettiva deve essere maggiore di quella critica, la si sceglie di almeno  . In realtà, considerando una tolleranza del
. In realtà, considerando una tolleranza del  , bisognerebbe salire almeno a
, bisognerebbe salire almeno a  , ma in pratica non è necessario perché l'induttanza massima è richiesta con il duty cycle minimo, quindi con corrente di uscita minima. Gli induttori a bassa corrente hanno una induttanza pari o maggiore di quella dichiarata, quindi si rispetta comunque la specifica. Ad alta corrente l'induttanza diminuisce dal
, ma in pratica non è necessario perché l'induttanza massima è richiesta con il duty cycle minimo, quindi con corrente di uscita minima. Gli induttori a bassa corrente hanno una induttanza pari o maggiore di quella dichiarata, quindi si rispetta comunque la specifica. Ad alta corrente l'induttanza diminuisce dal  fino al
fino al  circa, ma questo non porta il convertitore a lavorare in DCM perche' questa riduzione avviene quando la corrente di uscita è elevata.
circa, ma questo non porta il convertitore a lavorare in DCM perche' questa riduzione avviene quando la corrente di uscita è elevata.
D'ora in avanti il valore dell'induttanza nominale sarà di . Al più, se si volessero calcolare casi di worst case, la si può ridurre quando l'uscita è ad alta tensione e corrente.
Per selezionare l'induttore servono ancora la corrente massima e la corrente efficace. Analizzando la relazione (4a) che fornisce la corrente di picco si trova in questo caso specifico che la corrente di picco massima capita per (cosa che non capita in generale nei buck usati a tensione di uscita costante). Dalla eq. (4a) si vede che per D=1 la corrente massima è pari a quella di uscita.

La corrente efficace attraverso l'induttore è praticamente la corrente di uscita massima, che si ha con tensione di uscita massima applicata al carico.
In definitiva serve un induttore con induttanza di e corrente di lavoro di almeno  . Possibili componenti adatti per questa applicazione sono mostrati nei data sheet [2],[3] e [4]. Si vede che per questi componenti la resistenza in continua dell'avvolgimento è circa di una cinquantina di milliohm a temperatura ambiente. Quando lavorano la temperatura sale di circa
. Possibili componenti adatti per questa applicazione sono mostrati nei data sheet [2],[3] e [4]. Si vede che per questi componenti la resistenza in continua dell'avvolgimento è circa di una cinquantina di milliohm a temperatura ambiente. Quando lavorano la temperatura sale di circa  e la resistenza aumenta di circa il
e la resistenza aumenta di circa il  . Dal data sheet [4] si vede che a corrente molto piccola, l'induttanza di questo particolare induttore è molto al di sopra del valore nominale.
. Dal data sheet [4] si vede che a corrente molto piccola, l'induttanza di questo particolare induttore è molto al di sopra del valore nominale.
MOS
Avendo scelto una topologia con interruttore lo-side, serve un mos a canale N. Il processore di Arduino è alimentato a  , sembrerebbe che usando un MOS logic-level lo si possa pilotare direttamente. In realtà il processore non riesce ad erogare abbastanza corrente per accendere e spegnere il mos in modo sufficientemente veloce, per cui servirà un MOS driver alimentato a
, sembrerebbe che usando un MOS logic-level lo si possa pilotare direttamente. In realtà il processore non riesce ad erogare abbastanza corrente per accendere e spegnere il mos in modo sufficientemente veloce, per cui servirà un MOS driver alimentato a  .
.
La scelta del MOS consiste nello specificare due o tre parametri: massima tensione  quando il MOS è spento, la massima resistenza fra drain e source quando è acceso ed eventualmente il tipo di MOS, logic level oppure standard.
quando il MOS è spento, la massima resistenza fra drain e source quando è acceso ed eventualmente il tipo di MOS, logic level oppure standard.
La tensione massima vista dal MOS è pari a , quindi serve un MOS con  , in modo da avere un minimo di margine. Probabilmente un MOS da 100V costituisce una scelta migliore.
, in modo da avere un minimo di margine. Probabilmente un MOS da 100V costituisce una scelta migliore.
La resistenza drain source quando è acceso dipende dalla caduta di tensione che si è disposti ad accettare quando il MOS conduce. Una scelta ragionevole è che la caduta di tensione massima sul mos possa arrivare all'1% della tensione di ingresso, quindi  . Essendo il MOS una resistenza, conoscendo la caduta di tensione ammessa e la corrente massima che lo attraversa, si determina che
. Essendo il MOS una resistenza, conoscendo la caduta di tensione ammessa e la corrente massima che lo attraversa, si determina che  . Questa è la resistenza del mos a caldo, quando lavora, mentre sul data sheet si trova la resistenza a freddo, con il silicio a temperatura ambiente. Il rapporto fra le due resistenze è di circa 2, quando il mos è circa alla sua massima temperatura. In questo caso la temperatura non dovrebbe salire troppo, visto le piccole correnti in gioco e il fatto che il circuito sarà in un ambiento a temperatura non troppo calda, per cui si può assumere un rapporto di circa 1.5.
Questo significa che sul catalogo bisogna cercare un MOS con una tensione di lavoro di 60V (o anche 100V) e
. Questa è la resistenza del mos a caldo, quando lavora, mentre sul data sheet si trova la resistenza a freddo, con il silicio a temperatura ambiente. Il rapporto fra le due resistenze è di circa 2, quando il mos è circa alla sua massima temperatura. In questo caso la temperatura non dovrebbe salire troppo, visto le piccole correnti in gioco e il fatto che il circuito sarà in un ambiento a temperatura non troppo calda, per cui si può assumere un rapporto di circa 1.5.
Questo significa che sul catalogo bisogna cercare un MOS con una tensione di lavoro di 60V (o anche 100V) e  Due delle centinaia di possibili candidati sono in [5] e [6]. Si osservi la specifica di corrente media non entra praticamente mai nella scelta del MOS, perché se questo viene scelto in base alla sua resistenza drain source in conduzione, la corrente sopportabile dal dispositivo è quasi sempre molto maggiore di quella effettivamente circolante.
Due delle centinaia di possibili candidati sono in [5] e [6]. Si osservi la specifica di corrente media non entra praticamente mai nella scelta del MOS, perché se questo viene scelto in base alla sua resistenza drain source in conduzione, la corrente sopportabile dal dispositivo è quasi sempre molto maggiore di quella effettivamente circolante.
Il MOS OnSemi logic level richiede per essere acceso richiede sul gate circa 10nC. Ammesso che il processore riesca a fornire 20mA per tutta la durata della commutazione, il tempo di commutazione è, come ordine di grandezza  un po' lungo rispetto ai normali tempi di commutazione dei mos. Un tempo di commutazione lungo comporta dissipazione nel MOS ogni volta che commuta. Si noti che questa è solo una stima grossolana del tempo di commutazione, il calcolo esatto è abbastanza più complicato e spesso non si hanno dal data sheet i valori per il calcolo.
un po' lungo rispetto ai normali tempi di commutazione dei mos. Un tempo di commutazione lungo comporta dissipazione nel MOS ogni volta che commuta. Si noti che questa è solo una stima grossolana del tempo di commutazione, il calcolo esatto è abbastanza più complicato e spesso non si hanno dal data sheet i valori per il calcolo.
Diodo
Il diodo lavora con una tensione inversa massima pari a  , la corrente massima è quella solita di
, la corrente massima è quella solita di  , mentre la corrente media è data dall'equazione (7). Il massimo di questa espressione si ha con , per cui la massima corrente media che attraversa il diodo vale
, mentre la corrente media è data dall'equazione (7). Il massimo di questa espressione si ha con , per cui la massima corrente media che attraversa il diodo vale

Il diodo deve quindi essere in grado di reggere una tensione inversa di almeno  , portare una corrente media di
, portare una corrente media di  che si ha quando e sopportare un picco ripetitivo di corrente di che si ha con duty cycle prossimo a 1.
che si ha quando e sopportare un picco ripetitivo di corrente di che si ha con duty cycle prossimo a 1.
Per tensioni non troppo alte, come in questo caso, si hanno a disposizione due tecnologie, diodi a giunzione Schottky (metallo semiconduttore) oppure diodi a giunzione pn che devono essere veloci. I diodi Schottky hanno il vantaggio di avere una minore caduta di tensione diretta rispetto ai diodi a giunzione pn e di essere intrinsecamente veloci, non avendo cariche minoritarie accumulate.
La limitazione degli Schottky è che le tensioni di lavoro di solito arrivano fin verso il centinaio di volt e la temperatura del dispositivo non può salire come nei diodi pn, inoltre ad alta temperatura la corrente inversa diventa elevata. L'uso degli Schottky riduce le perdite e quindi migliora il rendimento, anche se a tensioni elevate come queste la differenza in alcuni casi non è sostanziale. Due esempi di diodi utilizzabili in questo circuito sono riportati in [7] e [8]. Si noti che nel diodo a giunzione pn, la caduta diretta  quando conduce
quando conduce  è di circa
è di circa  . Chi diceva che la caduta sui diodi in conduzione è di
. Chi diceva che la caduta sui diodi in conduzione è di  ?
?
Condensatore di uscita
Il condensatore di uscita è l'elemento che determina con la sua impedenza la tensione di ripple sul carico. Tipicamente è un condensatore elettrolitico all'alluminio (o al tantalio per tensioni non troppo alte), in qualche caso, specie a tensioni più basse, può anche essere un ceramico, con risparmio di costo e volume. Con una tensione di uscita di  , la sola scelta pratica è un elettrolitico all'alluminio.
, la sola scelta pratica è un elettrolitico all'alluminio.
A partire da pochi kilohertz per gli alluminio (e da qualche decina di kilohertz per i tantalio), l'impedenza di un elettrolitico è essenzialmente resistiva per cui alla frequenza di commutazione di uno switching, il condensatore ha un comportamento resistivo e pertanto la capacità del condensatore non entra nel progetto della parte di potenza!
I parametri che definiscono il condensatore di uscita sono la tensione di lavoro, in questo caso , la corrente efficace che lo attraversa, equazione (9) e il valore picco picco della corrente dell'induttanza, equazione (5). La corrente efficace è quella che scalda il condensatore attraversando l', mentre il valore del ripple di corrente moltiplicato per l' dà il ripple picco picco di tensione in uscita. Dall'equazione (5), il valore massimo del ripple di corrente si ha per per cui  , mentre la massima corrente efficace che circola nel condensatore si ha nelle stesse condizioni e dall'equazione (9) risulta pari a
, mentre la massima corrente efficace che circola nel condensatore si ha nelle stesse condizioni e dall'equazione (9) risulta pari a  .
.
Questi valori permettono di scegliere il condensatore. Ad esempio [9] ha una corrente efficace di  (un po' troppo vicina alla corrente del circuito, sarebbe opportuno salire con questo parametro) e una resistenza
(un po' troppo vicina alla corrente del circuito, sarebbe opportuno salire con questo parametro) e una resistenza  , e presenta una capacità di
, e presenta una capacità di  . Con questi dati, il condensatore dalla frequenza di
. Con questi dati, il condensatore dalla frequenza di  a salire ha un comportamento resistivo. Da notare che l' è un parametro parassita, spesso indicato come valore tipico e senza alcuna indicazione di tolleranza. Questo significa che bisogna non fidarsi troppo e non prendere un condensatore proprio al limite del valore di ESR.
a salire ha un comportamento resistivo. Da notare che l' è un parametro parassita, spesso indicato come valore tipico e senza alcuna indicazione di tolleranza. Questo significa che bisogna non fidarsi troppo e non prendere un condensatore proprio al limite del valore di ESR.
Condensatore di ingresso
Il condensatore di ingresso viene scelto in base alla tensione di lavoro e alla corrente efficace che lo attraversa. Il ripple di ingresso non è da tenere sotto controllo perché quasi sempre è troppo elevato per gli standard di compatiblità elettromagnetica e bisogna aggiungere un ulteriore filtro di ingresso.
Nei convertitori Buck il condensatore di ingresso è molto stressato da una elevata corrente che lo attraversa e bisogna prestare particolare attenzione a questo parametro. La formula (10) permette di valutare questo parametro, che raggiunge il suo massimo per D=0.75. Sostituendo i valori nella formula 10 si ottiene

Un condensatore adatto è in [10],  a
a  della serie Nichicon JPU, con una corrente massima di
della serie Nichicon JPU, con una corrente massima di  .
.
Stima delle perdite
Le perdite del circuito sono principalmente associate al MOS, al diodo e all'induttore. Contributi minori sono associati alla resistenza serie dei condensatori. Nel seguito si fa una stima delle perdite per identificare eventuali elementi che hanno perdite troppo elevate. Il calcolo delle perdite non può essere molto preciso, e in ogni caso non va fatto usando SPICE!
Induttore
Le perdite dell'induttore, quando lavora in modo continuo con ripple moderato, è essenzialmente legato alla resistenza serie in continua. La potenza dissipata è quella di una resistenza moltiplicata per il valore efficace della corrente al quadrato. La resistenza degli induttori scelti è di circa  a temperatura ambiente, e la corrente massima di uscita vale circa quindi
a temperatura ambiente, e la corrente massima di uscita vale circa quindi
 Da notare che questa resistenza provoca anche una caduta di tensione di
Da notare che questa resistenza provoca anche una caduta di tensione di  che vanno a sottrarsi alla tensione di uscita.
che vanno a sottrarsi alla tensione di uscita.
Se l'induttore fosse usato in modo discontinuo, il conto delle perdite sarebbe stato molto più complicato perché sarebbero entrate in gioco le perdite nel nucleo e le perdite per effetto pelle e derivati.
Diodo
Il diodo in conduzione si comporta approssimativamente come una sorgente di tensione costante, mentre in interdizione è praticamente un circuito aperto (tranne gli Schottky ad alta temperatura di giunzione). La potenza dissipata dal diodo è pertanto  dove
dove  è la caduta di tensione media sul diodo. Se si sceglie un diodo Schottky, la caduta diretta alla corrente massima vale circa
è la caduta di tensione media sul diodo. Se si sceglie un diodo Schottky, la caduta diretta alla corrente massima vale circa  per cui le perdite nel diodo valgono
per cui le perdite nel diodo valgono 
MOS
Le perdite nel mos sono di due tipi: conduzione e commutazione. Le perdite di conduzione derivano dal fatto che il mos acceso si comporta come una resistenza che dissipa una potenza pari a  . Il mos scelto ha una resistenza di canale dell'ordine di una sessantina di milliohm, che possono salire fino a una ottantina se il mos scalda di qualche decina di gradi. La stima della potenza massima dissipata per conduzione, che si ha quando la corrente di uscita è massima, vale quindi
. Il mos scelto ha una resistenza di canale dell'ordine di una sessantina di milliohm, che possono salire fino a una ottantina se il mos scalda di qualche decina di gradi. La stima della potenza massima dissipata per conduzione, che si ha quando la corrente di uscita è massima, vale quindi 
Le perdite di commutazione dipendono dal fatto che ogni volta in cui il MOS commuta da ON a OFF e viceversa, passa per un certo intervallo di tempo attraverso una zona lineare in cui sono contemporaneamente presenti corrente attraverso il MOS e tensione ai capi del MOS.
La potenza dissipata dal mos in commutazione dipende dalla frequenza di commutazione, dalla tensione e corrente commutata e dal tempo di commutazione e vale, supponendo che si accenda e si spenda nello stesso tempo, e che la corrente di accensione e di spegnimento siano quasi uguali

Anche in questo caso la massima potenza dissipata si ha per la massima corrente di uscita, quindi la dissipazione risulta pari a

Qui torna il valore del tempo di accensione e spegnimento. Se il mos è pilotato correttamente con un MOS driver, il tempo di commutazione potrebbe essere dell'ordine di una cinquantina di nanosecondi, mentre se si pilota il MOS direttamente dal microprocessore, probabilmente si sale a svariate centinaia di nanosecondi. Per avere una idea dell'ordine delle perdite si possono usare come valori  e
e  , ricordando che questi numeri sono poco più che una estrazione di numeri della tombola!
, ricordando che questi numeri sono poco più che una estrazione di numeri della tombola!
Nel caso di pilotaggio corretto, la potenza persa dal mos in commutazione vale  , mentre con il pilotaggio dal microprocessore potrebbe essere di circa una decina di watt.
, mentre con il pilotaggio dal microprocessore potrebbe essere di circa una decina di watt.
Verifica
Per la verifica iniziale si simula il circuito con componenti quanto più vicini possibili ai componenti reali, includendo anche i parametri parassiti. Dice un saggio dell'elettronica di potenza:
Quanto fa funzionare o non funzionare un convertitore a commutazione è per un terzo nello schema, per un terzo nei parametri parassiti dei componenti e per l'ultimo terzo nel layout del circuito
È pertanto evidente che non si può avere una simulazione perfetta del circuito, ma si può avere una prima verifica di non aver commesso errori grossolani.
Lo schema simulato è mostrato in Fig. 6, in cui si sono presi i primi componenti che fossero simili a quelli specificati nella fase di progetto. La simulazione salvata dura 3 cicli completi, dopo un tempo di simulazione non salvato di 200 cicli per consentire al circuito di andare a regime.
Figura 6 - Schema simulazione
Le ESR dei condensatori sono state aggiunte nel loro modello, come pure la resistenza serie dell'induttanza. L'impedenza in serie alla sorgente a 50V rappresenta l'impedenza interna della sorgente ed eventuale filtro per l'EMC : in questo modo la corrente impulsiva di ingresso passa quasi completamente attraverso il condensatore  . Il valore dell'induttanza dipende dalla corrente che la attraversa, e diminuisce all'aumentare della corrente. Il valore in simulazione dipende da in modo da simulare l'effettivo comportamento del componente reale che vale a corrente nulla e cala a
. Il valore dell'induttanza dipende dalla corrente che la attraversa, e diminuisce all'aumentare della corrente. Il valore in simulazione dipende da in modo da simulare l'effettivo comportamento del componente reale che vale a corrente nulla e cala a  a corrente massima.
a corrente massima.
Il MOS è un logic level da circa  di resistenza a freddo, il diodo è uno Schottky da e
di resistenza a freddo, il diodo è uno Schottky da e  . Il generatore di segnale ha una frequenza fissa di e la durata dell'impulso a livello alto è dato dal parametro del duty cycle . La resistenza in serie al gate, da
. Il generatore di segnale ha una frequenza fissa di e la durata dell'impulso a livello alto è dato dal parametro del duty cycle . La resistenza in serie al gate, da  a
a  modella la limitata capacità di pilotaggio in corrente del microprocessore. Nel caso di utilizzo di un driver, questa resistenza scende a
modella la limitata capacità di pilotaggio in corrente del microprocessore. Nel caso di utilizzo di un driver, questa resistenza scende a  circa e nel circuito con driver bisogna aggiungere un resistore di questo valore.
circa e nel circuito con driver bisogna aggiungere un resistore di questo valore.
Nel seguito si riporta il risultato delle simulazioni. Nella Fig. 7 si vede il comportamento con duty cycle del  .
.
Nel primo grafico si ha in viola la corrente nell'induttore, che parte da  e si vede essere continua, in verde la corrente di uscita che è il valor medio della corrente dell'induttore. In azzurro è rappresentata la corrente nel condensatore di uscita, uguale a quella dell'induttore meno il suo valor medio. La corrente in giallo è la corrente nel condensatore di ingresso, uguale a quella dell'interruttore meno il suo valor medio.
e si vede essere continua, in verde la corrente di uscita che è il valor medio della corrente dell'induttore. In azzurro è rappresentata la corrente nel condensatore di uscita, uguale a quella dell'induttore meno il suo valor medio. La corrente in giallo è la corrente nel condensatore di ingresso, uguale a quella dell'interruttore meno il suo valor medio.
Nel secondo grafico si ha in rosso la corrente nell'interruttore, e in blu quella nel diodo. Queste due correnti, sommate, danno la corrente nell'induttanza.
Nel terzo grafico e` mostrata in verde la tensione sul mos, che arriva fino a , in rosso la tensione sull'induttore (nodo di uscita meno drain del mos), questa tensione è a valor medio nullo e il valore picco picco è sempre pari alla tensione di ingresso, infine in viola è mostrata la tensione di uscita.
Figura 7 - D=25%
Nella Fig. 8 sono rappresentate le stesse grandezze della figura precedente, questa volta per duty cycle  . Questa è la condizione che dà il massimo ripple di corrente nell'induttanza, la massima tensione di ripple in uscita, il massimo stress di corrente al condensatore di uscita e la massima corrente media nel diodo.
. Questa è la condizione che dà il massimo ripple di corrente nell'induttanza, la massima tensione di ripple in uscita, il massimo stress di corrente al condensatore di uscita e la massima corrente media nel diodo.
Figura 8 - D=50%
Il ripple di corrente misurato dalla simulazione vale  , maggiore di quello calcolato di
, maggiore di quello calcolato di  , perché con la corrente di uscita pari a metà del massimo l'induttore riduce la propria induttanza. Nel modello simulato è solo di
, perché con la corrente di uscita pari a metà del massimo l'induttore riduce la propria induttanza. Nel modello simulato è solo di  : una riduzione del
: una riduzione del  dell'induttanza provoca un uguale aumento della corrente di ripple. La corrente efficace nel condensatore di uscita Co misurata sul grafico vale
dell'induttanza provoca un uguale aumento della corrente di ripple. La corrente efficace nel condensatore di uscita Co misurata sul grafico vale  , maggiore del 10% di quella calcolata prima a causa della maggiore ondulazione della corrente nell'induttanza. Infine il valore medio di corrente nel diodo vale
, maggiore del 10% di quella calcolata prima a causa della maggiore ondulazione della corrente nell'induttanza. Infine il valore medio di corrente nel diodo vale  . La tensione di ripple sull'uscita è di circa
. La tensione di ripple sull'uscita è di circa  , minore della specifica perché il condensatore scelto ha una ESR minore della massima accettabile.
, minore della specifica perché il condensatore scelto ha una ESR minore della massima accettabile.
Infine l'ultima figura presenta il funzionamento con  , che corrisponde alla condizione di massimo stress per il condensatore di ingresso.
, che corrisponde alla condizione di massimo stress per il condensatore di ingresso.
Figura 9 - D=75%
La corrente efficace attraverso il condensatore di ingresso vale  , maggiore dello stress in uscita, e la tensione di uscita misurata dalla simulazione è
, maggiore dello stress in uscita, e la tensione di uscita misurata dalla simulazione è  molto vicina al valore teorico.
molto vicina al valore teorico.
Conclusioni
Questi sono i conti di prima approssimazione per il dimensionamento del Buck di cui si parlava in [1].
La risposta alla domanda originale è che il filtro LC di un Buck non lo si progetta come filtro! L'induttanza è scelta per tenere il convertitore nel modo di funzionamento scelto, CCM o DCM, mentre il condensatore viene scelto in base alla sua resistenza serie e alla possibilità di sopportare la corrente che lo attraversa!
Per arrivare al circuito completo bisogna rivedere bene i risultati dei conti e simulazioni, cosiderare le temperature massime e gli eventuali dissipatori, montare un prototipo, fare su un po' di misure, correggere le cose che non vanno...
Non ho presentato la teoria che sta dietro al Buck, ho solo applicato ad un caso non comune i principi di funzionamento e dimensionamento dei Buck standard, ricavando quando necessario le relazioni degli stress.
Sitografia
[1] MarcoD Dimens filtro LC pilotaggio celle peltier
[2] Murata Murata Series 1400
[3] Vishay Vishay IHTH Series
[4] Talema DP Series
[5] On Semiconductor MOS Logic level 60V
[6] Infineon MOS standard 100V
[7] ST Schottky 60V 2A
[8] Vishay Diodo ultrafast BYT53B 100V 2A
[9] Kemet Elettrolitico 63V 100µF
[10] Nichicon Condensatore 63V 470µF, Irms 1.7A


