
 Elettrotecnica e non solo (admin)
Elettrotecnica e non solo (admin) Un gatto tra gli elettroni (IsidoroKZ)
Un gatto tra gli elettroni (IsidoroKZ) Esperienza e simulazioni (g.schgor)
Esperienza e simulazioni (g.schgor) Moleskine di un idraulico (RenzoDF)
Moleskine di un idraulico (RenzoDF) Il Blog di ElectroYou (webmaster)
Il Blog di ElectroYou (webmaster) Idee microcontrollate (TardoFreak)
Idee microcontrollate (TardoFreak) PICcoli grandi PICMicro (Paolino)
PICcoli grandi PICMicro (Paolino) Il blog elettrico di carloc (carloc)
Il blog elettrico di carloc (carloc) DirtEYblooog (dirtydeeds)
DirtEYblooog (dirtydeeds) Di tutto... un po' (jordan20)
Di tutto... un po' (jordan20) AK47 (lillo)
AK47 (lillo) Esperienze elettroniche (marco438)
Esperienze elettroniche (marco438) Telecomunicazioni musicali (clavicordo)
Telecomunicazioni musicali (clavicordo) Automazione ed Elettronica (gustavo)
Automazione ed Elettronica (gustavo) Direttive per la sicurezza (ErnestoCappelletti)
Direttive per la sicurezza (ErnestoCappelletti) EYnfo dall'Alaska (mir)
EYnfo dall'Alaska (mir) Apriamo il quadro! (attilio)
Apriamo il quadro! (attilio) H7-25 (asdf)
H7-25 (asdf) Passione Elettrica (massimob)
Passione Elettrica (massimob) Elettroni a spasso (guidob)
Elettroni a spasso (guidob) Bloguerra (guerra)
Bloguerra (guerra)
Oggi ci serve un convertitore DC/DC isolato. La tensione di ingresso raggiunge al massimo 420 V, dato che questo stadio segue un PFC con tensione media di uscita a 400 V. Data la bassa potenza di questo stadio il PFC non sarebbe necessario, ma c'è comunque per alimentare un altro convertitore da 1.2 kW.
Tutti i risultati che vengono derivati valgono anche per un convertitore AC/DC, che si ottiene eventualmente anteponendo a questo convertitore un "ponte a diodi" con capacità classico.
L'uscita deve essere regolata a 12 V con 1.25 A disponibili. In più, per alimentare qualche carico che sta prima dell'isolamento, ci servono 12 V anche al primario, con 100 mA al massimo. Riassumendo:
- Vin,min = 260 V
- Vin,max = 420 V
- Vout = 12 V, 1.25 A max
- Vaux = 12 V, 0.1 A max
Indice |
La filosofia del Flyback
Il convertitore flyback è un classico per le conversioni a bassa potenza "da muro": le sue versioni più barbare (a snubber passivo) si trovano nei vecchi carica-cellulare da 500 mA, 5 V che ci hanno accompagnato fino a qualche anno fa, e in generale nell'80% dei convertitori AC/DC per elettrodomestici che richiedono meno di 30 W. Questo numero l'ho appena inventato io, non ho fatto un'analisi di mercato per arrivarci, è solo per dare un'idea in base a svariati casi che ho incontrato.
Il punto forte di questa topologia è l'utilizzo di un solo componente magnetico: esso permette uno step-down di tensione importante, e contemporaneamente fornisce l'isolamento dalla rete. Questa motivazione spinge tutt'ora la ricerca industriale e accademica verso nuove soluzione flyback-derived (nel 2019, ad esempio, abbiamo pubblicato questo), fondamentalmente perché garantisce sempre un'ottima densità (volumica) di potenza.
A differenza delle topologie forward, che uniscono al trasformatore un induttore di uscita, il flyback è intrinsecamente limitato in potenza da alcune caratteristiche fondamentali, che spingono il progettista verso altre soluzioni quando il carico diventa importante.
La corrente negli avvolgimenti del trasformatore (che non è un trasformatore, sono degli induttori accoppiati molto bene, ma io lo chiamerò trasformatore lo stesso) è molto diversa dalle topologia forward: qui conduce solo un avvolgimento alla volta e la prima armonica è molto grande rispetto a quella continua, degradando fortemente la resistenza equivalente nel rame in alta frequenza.
In più, scelta la frequenza di funzionamento ed un volume massimo ammissibile, il campo magnetico della ferrite del trasformatore dipende dal carico: questo non è in generale vero nelle topologie forward, ed è un altro motivo per cui esiste quel trade-off dei 30 (circa) W.
E come funziona?
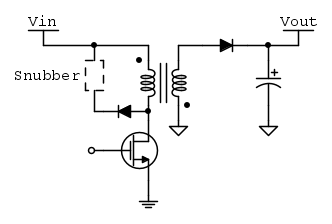
Come già accennato, il "trasformatore" è in realtà composto da due induttori accoppiati quasi perfettamente. Questi due induttori hanno un diverso numero di giri intorno allo stesso nucleo. Di solito, quando si costruiscono o si acquistano, viene fornita l'induttanza di magnetizzazione Lm, che è l'induttanza vista al primario, che è "il lato con più giri" in questo tipo di conversione. Nelle figure seguenti chiamo l'induttanza al primario Lp = Lm, e quella al secondario  , con
, con  (rapporto tra numero di giri).
(rapporto tra numero di giri).
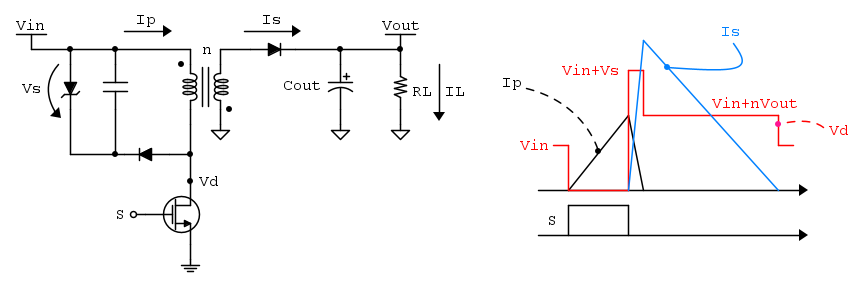
Il flyback funziona in modo abbastanza semplice. In prima analisi possiamo immaginare di lavorare a frequenza fissa accendendo e spegnendo il MOSFET S: quando S è acceso, il trasformatore si carica attraverso la tensione Vin. Allo spegnimento di S, che avviene in genere al raggiungimento di una corrente di riferimento (Iref), la corrente di primario si trova la strada "sbarrata" e viene specchiata al secondario, caricando le capacità di uscita.
Questo, in parole povere, avviene perché la corrente al primario sta percorrendo un grosso induttore, che condivide la quasi totalità del suo campo con l'induttore al secondario. Durante la carica, Is è bloccata dal diodo (notare i pallini opposti), che sopporta una tensione pari a Vout − nVin, ma quando S viene spento l'energia nel trasformatore  "viene rappresentata da"
"viene rappresentata da"  , venendo (quasi) completamente trasferita all'uscita tramite Is che diventa positiva.
, venendo (quasi) completamente trasferita all'uscita tramite Is che diventa positiva.
Per motivi di efficienza, questo convertitore lavora quasi sempre in conduzione discontinua (DCM): questo significa che la corrente (ed il campo magnetico nel nucleo del trasformatore) torna sempre a zero prima del ciclo successivo. Questo rende molto semplice calcolare la potenza trasferita al carico, infatti, se carichiamo il trasformatore sempre fino alla corrente Iref, abbiamo:

Il funzionamento in DCM è garantito se l'energia del trasformatore si azzera prima dell'accensione successiva. È sufficiente sommare i due intervalli di conduzione per capire quando è l'unga la fase di magnetizzazione: quando è acceso S (Ton) e quando è acceso il diodo (Toff); l'inverso della frequenza di commutazione dovrà essere più lungo di questo intervallo.


Nella figura sopra ho riportato la tensione sopportata da S durante la fase di OFF: qui si può apprezzare il funzionamento dello snubber, che in questo caso è composto da un diodo zener (che poi sarà un TVS) con tensione di reverse Vs: questo componente determina il massimo "spillo" di tensione che S deve sopportare durante la vita del convertitore. Il suo utilizzo è necessario per scaricare l'energia accumulata nell'induttanza di leakage, ossia l'energia che non può essere trasportata al secondario poiché non associata ad un campo magnetico condiviso da entrambi gli avvolgimenti.
Lo snubber è alimentato solo durante un breve periodo, in cui la corrente di leakage attraversa "a fatica" lo zener (o chi per esso) fino ad annullarsi; dopo la scarica della leakage, il diodo collegato al drain di S si interdice. La tensione che lo snubber mostra in accensione Vs la vorremmo più grande possibile, perché di fatto aumenta l'efficienza della conversione, ma dobbiamo tenere il MOS S entro limiti operativi sicuri.
Si noti poi che, durante la conduzione del secondario, S deve sopportare la tensione di alimentazione sommata a quella di uscita, che si riflette moltiplicata per il rapporto di trasformazione.
Scegliamo i componenti
A questo punto dobbiamo mettere in piedi un sistema fatto di componenti commerciali e disegnare la board, saldare e vedere se tutto funziona.
Trasformatore
In questo articolo non affronto il design del trasformatore, anche perché ne ho già parlato qui. Invece, andrò a cercare qualcosa di già pronto che faccia al caso mio: per questo range di potenza e data la "classicità" della conversione non ci sono problemi di reperibilità.
Mi serve qualcosa che abbia un ingresso, un avvolgimento ausiliario (al primario mi servono quei 12 V in più) e un'uscita. Cercando su Mouser e Digikey (per esempio), filtro per tensione di uscita nominale, potenza nominale e tensione di ingresso nominale, trovando lui:
Aprendo il datasheet trovo già la magnetizzante e il rapporto di trasformazione. Al primario c'è -quasi- sempre anche un "AUX", che serve ad alimentare in modo efficiente il controllore (di solito i controllori si avviano dall'alta tensione con un lineare, che scalda come un matto, per poi assorbire energia da un avvolgimento ausiliario, che di fatto è come fosse un altro secondario). Tale AUX è avvolto in modo da garantire l'isolamento verso il secondario, che per noi sarà una "terra sicura".
Nota: alcuni controllori, noto il rapporto di trasformazione tra AUX e secondario, possono "campionare" la tensione di uscita attraverso questo avvolgimento. Questo semplifica la rete di feedback, che non richiede più un optoisolatore. Un esempio è ALTAIR04-900 di STMicroelectronics, che campiona AUX appena prima della demagnetizzazione (l'esaurimento dell'energia nel trasformatore) ma non è quello che useremo.
Dai rapporti di trasformazione e dalle tensioni nominali posso già dire che AUX andrà ulteriormente regolato, fornendo una tensione nominale circa doppia rispetto a quella di uscita (4:1 rispetto a 8:1). Già qui scelgo di utilizzare un micro-buck per passare da 24 V a 12 V, anche perché la corrente nominale dichiarata è poca e non voglio usare un lineare.
Controllore
Nella descrizione del trasformatore (nell'immagine di Digikey) noto che viene già consigliato un controllore: nulla di meglio.
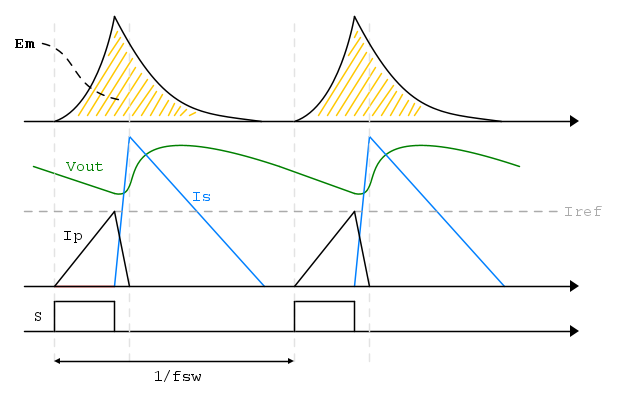
Viene proposto l'utilizzo di un IC della famiglia TNY274-280, prodotti da POWER INTEGRATIONS. Si tratta di un controllore isteretico con corrente di picco fissa. In pratica si tratta di un IC (che include il MOSFET S) che carica il primario fino ad una Iref fissa, facendo poi seguire la normale fase di OFF. Al ciclo di clock successivo, un optoisolatore comunica al controllore se la tensione di uscita è ancora sopra il riferimento (per noi sarà 12 V): in caso positivo, viene saltato il ciclo. In caso contrario, cioè se la tensione è scesa troppo (ad esempio se ho un grosso carico) verrà nuovamente caricato il trasformatore, inviando al secondario un altro "pacchetto" di energia" fisso. Il comportamento nel tempo è schematizzato nel datasheet:
Questa immagine mostra delle forme d'onda meno semplificate delle mie: si può osservare l'azione dello snubber allo spegnimento di S e soprattutto il "ringing" che segue la demagnetizzazione. Al termine della conduzione del diodo, infatti, la capacità di S Coss risuona con l'induttanza di magnetizzazione. Questo a noi non fa alcuna differenza, dato che il secondario è interdetto dal diodo.
Notiamo poi la modalità di funzionamento della rete di feedback: in questo caso non c'è un segnale che rappresenta la corrente di picco come nell'articolo su forward; abbiamo invece un semplice zener che manda in conduzione un optoisolatore. Come detto, al superamento di (ad esempio) 12 V, lo zener si accende e la corrente nel LED cresce, abbassando il pin EN del controllore. Come visibile dalle waveform (e anche a sentimento dato che deriva dal nome ENable) un abbassamento del pin EN sotto una certa soglia comporta lo "skipping" di un ciclo, dato che non si vuole caricare Vout ancora di più.
Questo metodo ha dei grossi vantaggi:
- il feedback è semplicissimo
- la banda è molto elevata
- il campo massimo nel trasformatore è fisso
ma di contro
- l'uscita ha un brutto ripple
Il ripple di tensione di uscita è infatti la combinazione di una serie di "incrementi" di ampiezza fissa sovrapposti ad un'evoluzione più lenta, spesso di periodicità variabile (che poi è un divisore della frequenza di commutazione). Per questa applicazione mi interessa poco, e comunque il ripple è riducibile a piacere aggiungendo capacità di uscita.
In controllore fornisce anche diverse protezioni.
- Sovraccarico: questo è rilevato monitorando il pin EN, se il pin non viene abbassato per 64 ms consecutivi dall'optoisolatore, il controllore si spegne e ritenta l'avvio ciclicamente. Se EN rimane alto indefinitamente, significa infatti che i pacchetti di energia portati al secondario sono continui ed insufficienti e soddisfare le richieste del carico, che fa "sedere" la tensione di uscita.
- Under-voltage lockout: la tensione di ingresso minima per l'accensione è programmabile.
- Output over-voltage: AUX può essere utilizzato per spegnere indefinitamente il controllore se viene superata una certa tensione di uscita, ad esempio a seguito di un danneggiamento della rete di feedback.
Tornando al dimensionamento, è necessario scegliere il part-number esatto: questa famiglia di controllori fornisce una corrente di picco fissa (in realtà è leggermente modulata in runtime, così come la frequenza, ma per altri motivi). Dobbiamo scegliere il "codice" con la corrente di picco necessaria. Ci viene in aiuto la tabella in prima pagina:
Scegliamo TNY277P (notare che la nostra tensione di ingresso sarà un po' più alta dei 230 Vac rettificati, quindi faremo meglio i conti). Questo IC regola una corrente di picco nominale di 450 mA. Vediamo ora se, col nostro trasformatore, possiamo erogare la potenza necessaria. Il regolatore ha una frequenza fissa di 132 kHz, quindi:

Riprendendo la formula per il funzionamento in DCM, che deve essere garantito, troviamo con questa corrente di picco:
Vin,min = 84V,
ampiamente sufficiente. Programmeremo comunque l'UVLO ad una tensione maggiore, dato che una tensione così bassa non dovremmo mai averla. Consideriamo anche che la frequenza ha un jitter (per migliorare le performance di compatibilità elettromagnetica) e che la corrente di picco è leggermente modulata: aggiungendo a questo il ritardo introdotto dalla leakage, mi sentirei sicuro solo con una tensione di UVLO del 50% in più.
Schematico e PCB
A questo link potete trovare lo schematico in KiCad dell'alimentatore. Ne discuterò brevemente alcune parti, magari aprite quello completo in un'altra finestra.
Qui si vede la scelta dello snubber. Come anticipato, è formato da uno "zener" che in realtà è implementato tramite due componenti in serie, classificati come "Soppressori ESD/Diodi TVS 90V 400W". In pratica sono delle giunzioni ingegnerizzate per sopprimere una sovratensione, sopportando correnti impulsive elevate. Con due TVS da 90 V in serie, lo snubber scarica la leakage con 180 V; questo significa che
VD,max = Vin,max + Vs = 420 V + 180 V = 600 V.
Il MOSFET integrato ha il breakdown a 700 V: un margine del 15% non è proprio il top, eventualmente si potrebbe abbassare leggermente la tensione di uscita del PFC, facendo sì che il ripple della nostra tensione di ingresso abbia il picco a 400 V.
In parallelo alla serie dei TVS si trova C5, che li mantiene sulla soglia della conduzione per il prossimo ciclo e ne ammorbidisce l'accensione.
R1 + R2 determinano la soglia di uscita dall'UVLO, mentre la rete collegata ad AUX è utilizzata per interdire il lineare interno al controllore, alimentandolo dall'esterno con maggior efficienza. Qui si vede anche il collegamento del collettore dell'optoisolatore al pin di ENable, necessario alla regolazione.
Al secondario si possono notare per prima cosa due diodi di rettifica. Due diodi in parallelo non sono esattamente consigliabili perché quasi sempre il mismatch di corrente è grande, tuttavia il problema può essere risolto accoppiando termicamente le due giunzioni, in parole povere montando i dispositivi fisicamente vicini sulla board (e magari usando lo stesso lotto per entrambi).
C10 è un grasso condensatore al tantalio, affiancato da un piccolo ceramico.
Il feedback è composto dal classico TL431 collegato al catodo dell'optoisolatore (ho parlato ampiamente di questo componente nella seconda parte dell'articolo sul forward, a questo link): riassumendo, U4 è in pratica un amplificatore operazionale "open drain" con una precisa tensione di riferimento interna. Se la tensione al centro del partitore R9/R10 supera 2.5 V, la corrente di catodo aumenta. Essendo questa la stessa corrente nel LED dell'opto U3, il pin EN viene di conseguenza abbassato. Il pin, se lasciato in alta impedenza, ossia quando il feedback "chiede energia", è mantenuto ad una tensione fissa dal controllore (si veda eventualmente il datasheet).
Curiosità sul resistore bleeder
Questa parte complica la discussione; non è necessario leggerla se siete alle prime armi e vi interessa solo progettare un flyback senza stranezze ausiliarie.
Oltre al LED D10, che è per pura estetica, è predisposto (e poi saldato) il resistore R14 che è un vero e proprio bleeder. A 12 V, R14 impone un consumo fisso di 144 mW. Tale consumo ha come conseguenza indiretta quella di tenere "viva" la rete di AUX, che come si vedrà nella figura che segue è utilizzata, oltre che per alimentare il controllore esternamente, a generare i 12 V ausiliari a lato primario. La tensione che si riflette su AUX (pin 6-4) è positiva solo durante l'accensione dei diodi al secondario, ossia durante quello che ho chiamato Toff, e porta il pin AUX del trasformatore a  rispetto al riferimento di primario (ricordate che il rapporto di trasformazione tra questi due avvolgimenti è di 8:4). Osservate la seguente figura, che mostra il collegamento di AUX ad un piccolo regolatore buck:
rispetto al riferimento di primario (ricordate che il rapporto di trasformazione tra questi due avvolgimenti è di 8:4). Osservate la seguente figura, che mostra il collegamento di AUX ad un piccolo regolatore buck:
(Mi dispiace ma le immagini non vengono automaticamente ridimensionate e devo tagliarle a 600 pixel orizzontali)
Il fatto è questo: caricando l'uscita del buck alla corrente massima (100 mA), dovrò avere un numero di accensioni del flyback sufficiente a mantenere una certa tensione sulle capacità in uscita da AUX (C2, C4, C12), altrimenti il buck si spegne.
Se l'uscita "principale" (al secondario) non ha alcun carico (vabbè c'è il feedback e il led ma è poca roba), ci saranno poche accensioni del flyback e di conseguenza pochi "ripristini" della tensione sulle capacità di AUX. Durante un'accensione, infatti, l'avvolgimento al secondario e quello ausiliario sono praticamente in parallelo, e viene ricaricato quello a tensione minore. Se le capacità di AUX hanno perso tensione, al fronte di un'accensione saranno queste ad essere caricate per prime (D1 viene acceso dalla magnetizzante, D9/D12 no). Non essendosi caricata l'uscita regolata, il feedback continuerà a "chiedere" finché AUX non avrà raggiunto 2Vout, deviando poi l'energia all'uscita principale (D1 quasi acceso, D9/D12 accesi).
In altre parole, il feedback è "cieco" rispetto alla rete su AUX (ovviamente dato che non vi è retroazione collegata). L'unica cosa che sa è che quando porta energia al secondario c'è qualcosa che se ne mangia una parte, ma non se la prende più di tanto. Il resistore aggiuntivo aumenta la frequenza di campionamento di AUX.
PCB
Ho disegnato la scheda in KiCad. Qui riporto Top e Bottom, tanto per dare l'idea:
A questo link c'è l'intero progetto, la BOM e i Gerber per la produzione. Non posso allegare su forum, ma confido che drive sopravviva finché lo farò io.
Da notare:
- isolamento al centro della board,
- capacità di AUX e mini-buck in basso a sinistra
- coppia di TVS in alto a sinistra
- accoppiamento termico dei diodi D9/D12
sul resto non c'è molto da dire.
Questo è l'alimentatore finito:
Misure di laboratorio
Osserviamo le waveforms principali del convertitore:
- Il nodo di phase, ossia Vs in verde
- La tensione ai capi del trasformatore al secondario (pin 9-12) in azzurro
- La tensione di uscita principale in giallo
Basso carico. Iout = 0 A, I12p = 100 mA, Vin = 400 V.
Nell'immagine sopra, a bassissimo carico, si nota lo "skipping" di vari cicli. Questo è evidente dalla presenza del "ringing" al nodo Vd. Durante l'accensione di S, il nodo di phase è portato a 0 V, alimentando il trasformatore con la tensione di ingresso. Al secondario, durante il powering la tensione è negativa e i diodi di rettifica sono interdetti, mentre durante la loro conduzione il nodo si trova a Vout. Si può intravedere la "ricarica" della tensione di uscita (in giallo), che cresce dopo lo spegnimento di S.
Medio carico. Iout = 0.6 A, I12p = 100 mA, Vin = 400 V.
A medio carico, la fase di power viene attivata circa la metà delle volte. È qualcosa di atteso dato che la potenza di uscita è lineare con la densità delle fasi di "powering".
Pieno carico. Iout = 1.25 A, I12p = 100 mA, Vin = 400 V.
A pieno carico il pin EN è quasi sempre tenuto basso dalla rete di feedback, il controllore non salta quasi nessun ciclo e siamo vicinissimi alla soglia di sovraccarico: come già introdotto, se il controllore smettesse completamente di saltare cicli, andrebbe in protezione dopo un tempo fisso.
In questa immagine è anche chiaro che ci troviamo quasi in boundary-mode: si nota infatti che lo spazio tra la demagnetizzazione e la fase di power, individuabile dalla "caduta" della traccia in verde, è estremamente ridotto. Il controllore sta infatti modulando la corrente di picco di una certa percentuale (da 450 mA a 481 mA per la precisione): questa tecnica permette di ridurre il ripple in uscita (group pulsing) a quanto dice il datasheet, sinceramente non ho fatto i conti ma mi fido. Una maggior energia nel trasformatore richiede più tempo sia ad essere caricata che scaricata (si veda la formula sopra); aggiungendo a questo l'induttanza di leakage, che di fatto rallenta lo "specchiamento" della corrente, ci troviamo vicino al funzionamento CCM.
Se non si dimensiona correttamente la corrente di picco, ad esempio abbassandola comprando un altro part-number di questa famiglia (perdendo però potenza in uscita) oppure non si alza Vout, c'è il rischio di rimbalzare tra CCM e DCM. Questo fenomeno, oltre ad aumentare il ripple di uscita, diminuisce drasticamente l'efficienza del convertitore, o più gravemente porta in protezione termica il controllore per colpa dell'enorme picco di energia dissipato da S in accensione quando la demagnetizzazione non è completa.
In questo caso, questo fattore è stato controllato con la misura qui sopra.
ripple_.png
Qui c'è il ripple di tensione in uscita (accoppiamento AC). L'ampiezza di tale ripple è riducibile a piacere con le capacità di uscita. Come già accennato, il controllo a isteresi si traduce in due "costanti di tempo" sovrapposte: ad fsw c'è una componente, mentre a fsw / n c'è quella dettata dal carico, che scarica più o meno velocemente l'uscita prima dell'intervento del feedback (quest'ultimo paragrafo non è molto rigoroso).
E ora due immagini termiche: la prima è a "basso carico", in realtà con la corrente massima prelevata dai 12 V ausiliari, infatti si nota il diodo in uscita da AUX abbastanza caldo (attenzione, questo diodo deve sopportare una grossa tensione inversa quando è interdetto e non si riescono ad usare Schottky a bassissima caduta). In basso a sinistra si vede anche un leggero aumento di temperatura del buck, sia del controllore che dell'induttore.
Il controllore è anch'esso caldo, dovendosi comunque "sorbire" alcune perdite di commutazione e una corrente di picco fissa e non proprio piccola. Al secondario si intravede il diodo led, che per coincidenza è davvero verde.
Basso carico. Iout = 0 A, I12p = 100 mA, Vin = 400 V.
A pieno carico si registra una temperatura massima accettabile (siamo in convezione libera senza case, come lo saremo nel caso reale). Il diodo di AUX è leggermente più caldo, ma questo è più che altro causato del riscaldamento del controllore. In uscita si apprezza il riscaldamento dei diodi di rettifica, che come da design condividono una temperatura molto simile, complice il piano di rame di Vout.
Pieno carico. Iout = 1.25 A, I12p = 100 mA, Vin = 400 V.
In questo articolo non ho incluso transitori di carico (anche per motivi di tempo): essendo un sistema ad isteresi, la transizione di carico è comunque poco interessante ed è caratterizzata da una variazione istantanea nel numero di cicli di power.
Per concludere, una curiosità sullo startup: questo controllore, essendo intrinsecamente limitato in corrente, prevede uno startup "incontrollato". In altre parole, la velocità di avvio dipende solo dalle capacità di uscita, dato che fino al raggiungimento della tensione di regime il flyback è in pratica un generatore di corrente costante (fase di power continua).
Questa soluzione è una tra le più semplici che ho trovato per il design di un flyback, dato che ha come gradi di libertà solamente la selezione della corrente di picco del controllore e il trasformatore, che con qualche iterazione viene facilmente determinata.




