
 Elettrotecnica e non solo (admin)
Elettrotecnica e non solo (admin) Un gatto tra gli elettroni (IsidoroKZ)
Un gatto tra gli elettroni (IsidoroKZ) Esperienza e simulazioni (g.schgor)
Esperienza e simulazioni (g.schgor) Moleskine di un idraulico (RenzoDF)
Moleskine di un idraulico (RenzoDF) Il Blog di ElectroYou (webmaster)
Il Blog di ElectroYou (webmaster) Idee microcontrollate (TardoFreak)
Idee microcontrollate (TardoFreak) PICcoli grandi PICMicro (Paolino)
PICcoli grandi PICMicro (Paolino) Il blog elettrico di carloc (carloc)
Il blog elettrico di carloc (carloc) DirtEYblooog (dirtydeeds)
DirtEYblooog (dirtydeeds) Di tutto... un po' (jordan20)
Di tutto... un po' (jordan20) AK47 (lillo)
AK47 (lillo) Esperienze elettroniche (marco438)
Esperienze elettroniche (marco438) Telecomunicazioni musicali (clavicordo)
Telecomunicazioni musicali (clavicordo) Automazione ed Elettronica (gustavo)
Automazione ed Elettronica (gustavo) Direttive per la sicurezza (ErnestoCappelletti)
Direttive per la sicurezza (ErnestoCappelletti) EYnfo dall'Alaska (mir)
EYnfo dall'Alaska (mir) Apriamo il quadro! (attilio)
Apriamo il quadro! (attilio) H7-25 (asdf)
H7-25 (asdf) Passione Elettrica (massimob)
Passione Elettrica (massimob) Elettroni a spasso (guidob)
Elettroni a spasso (guidob) Bloguerra (guerra)
Bloguerra (guerra)
Indice |
Sommario
Questo articolo si propone di analizzare a 360° (anche a 270° sarebbe già un traguardo) il problema della stabilità per quel che riguarda i sistemi di controllo automatico. Come certamente sapranno i professionisti del settore presenti su EY e non solo, questa tematica ricopre un'importanza non indifferente in ambito ingegneristico sia in fase di analisi che di sintesi, così come in ambito squisitamente applicativo (automazione industriale, processi, ecc.). Inutile dire che la trattazione non ha alcuna pretesa di rigore o di correttezza assoluta, visto che il livello è quello di un corso basilare di Controlli Automatici di ingegneria, quindi ogni appunto, consiglio, correzione non può che essere ben accetto. Vi ringrazio in anticipo per l'attenzione.
1. Introduzione
Nel precedente articolo (Parte I e Parte II) abbiamo esaminato il comportamento di un sistema di controllo in regime permanente (o, similmente, in condizioni statiche) e si è fatto uso del teorema del valore finale, con l'avvertenza che esso sia valido qualora il sistema di controllo ammetta un valore finale. Ho evidenziato in grassetto questa frase volutamente, perché in essa risiede l'essenza della nostra trattazione: la tendenza che ha un sistema automatico di raggiungere la condizione di regime permanente, quindi ammettere proprio un valore finale finito, esatto, preciso, è intrinsecamente legata alla proprietà di stabilità del sistema stesso. Ci rendiamo conto quindi che uno studio completo ed accurato di un sistema di controllo non può soffermarsi unicamente al suo comportamento in condizioni statiche (che già di per sé fornisce delle informazioni molto importanti, come abbiamo avuto modo di constatare), ma deve necessariamente esaminare le caratteristiche dei transitori per accertare che le variabili in gioco mostrino effettivamente l'attitudine a portarsi sui valori individuati nell'analisi statica.
2. Equilibrio
Introdurre il concetto di equilibrio è basilare nella nostra trattazione perché, partendo dalla sua analisi formale, possiamo pervenire ad una definizione chiara ed univoca del concetto di stabilità, anche se questo richiede inevitabilmente qualche richiamo alla teoria dei sistemi (con il necessario formalismo matematico richiesto dal contesto e che ho cercato comunque di alleggerire laddove possibile).
Consideriamo un sistema rappresentato dal seguente modello matematico:
![\mathbf{x}(t)=\boldsymbol{\varphi}(t,t_{0},\mathbf{x}_{0},\mathbf{u}_{[t_{0},t)})\,\,\,\,\,\,\,\,\,\,\,\,[1]](/mediawiki/images/math/3/0/8/308723a8d3b71661b064c563ba788458.png)
![\mathbf{y}(t)=\mathbf{g}(\mathbf{x}(t),\mathbf{u}(t),t)\,\,\,\,\,\,\,\,\,\,\,\,[2]](/mediawiki/images/math/5/8/6/586654f21e6d9fa6ad98e49ad76161ed.png)
Diamo la seguente:
- Definizione 2.1 - Uno stato
 si definisce di equilibrio per il sistema [1]-[2] se, ammettendo che il sistema si trovi inizialmente nello stato
si definisce di equilibrio per il sistema [1]-[2] se, ammettendo che il sistema si trovi inizialmente nello stato  e che l'ingresso sia nullo o al più uguale ad un valore costante
e che l'ingresso sia nullo o al più uguale ad un valore costante  , esso permarrà indefinitamente in
, esso permarrà indefinitamente in  :
:
![\mathbf{x}_e=\boldsymbol{\varphi}(t,t_{0},\mathbf{x}_{e},\mathbf{u}_{[t_{0},t)})\,\,\,\,\,\,\,\,\,\,\,\,[3]](/mediawiki/images/math/d/2/5/d254a6119a3e5e031561ef349b73b871.png)
Pensiamo banalmente ad una biglia vincolata a muoversi su una curva concava contenuta in un piano verticale:

Supponiamo che il suo movimento iniziale sia stato impresso da una causa esterna all'istante  ; per effetto della forza d'attrito che si oppone al moto, la biglia si fermerà alla base della curva dopo un certo tempo e rimarrà indefinitamente in questo punto per
; per effetto della forza d'attrito che si oppone al moto, la biglia si fermerà alla base della curva dopo un certo tempo e rimarrà indefinitamente in questo punto per  finché una nuova sollecitazione esterna (una forza ad esempio) non ne modifichi la condizione di quiete: l'origine degli assi rappresenta quindi una posizione di equilibrio per il sistema.
finché una nuova sollecitazione esterna (una forza ad esempio) non ne modifichi la condizione di quiete: l'origine degli assi rappresenta quindi una posizione di equilibrio per il sistema.
In termini di praticità, il calcolo degli stati di equilibrio mediante la [3] non è il massimo poiché spesso il modello cui si perviene quando si desidera determinare una descrizione matematica di un sistema reale è del tipo:
![\mathbf{\dot{x}}(t)=\mathbf{f}(\mathbf{x}(t),\mathbf{u}(t),t)\,\,\,\,\,\,\,\,\,\,\,\,[4]](/mediawiki/images/math/4/6/6/466365261434b13caf228a3a64de482d.png)
che, congiuntamente alla [2] caratterizza il modello ingresso-stato-uscita in forma implicita. Considerando il caso particolare in cui la sollecitazione sia nulla  e tenendo conto della Definizione 2.1, possiamo dire che gli stati di equilibrio sono le soluzioni costanti della seguente equazione vettoriale:
e tenendo conto della Definizione 2.1, possiamo dire che gli stati di equilibrio sono le soluzioni costanti della seguente equazione vettoriale:
![\mathbf{0}=\mathbf{f}(\mathbf{x}_{e},\mathbf{0},t)\,\,\,\,\,\,\,\,\,\,\,\,[5]](/mediawiki/images/math/c/c/8/cc80c39fdb93096534bf78cf2d009efd.png)
Per i sistemi lineari e stazionari (quelli non lineari e/o non stazionari necessiterebbero di una trattazione a parte), la [5] è particolarizzabile come segue:
![\mathbf{Ax_{e}=0}\,\,\,\,\,\,\,\,\,\,\,\,[6]](/mediawiki/images/math/2/c/f/2cf717a14671abc534cd7e21ab6c9648.png)
che ammette soluzione unica coincidente banalmente con quella nulla  se
se  , oppure infinite soluzioni, ivi compresa quella nulla, che costituiscono un sottospazio lineare dello spazio di stato
, oppure infinite soluzioni, ivi compresa quella nulla, che costituiscono un sottospazio lineare dello spazio di stato  , se
, se  . L'esempio che segue chiarirà meglio quanto appena esposto.
. L'esempio che segue chiarirà meglio quanto appena esposto.
Esempio 1
Consideriamo un sistema meccanico costituito da un classico pendolo semplice formato da un'asta rigida lunga l e di massa trascurabile, terminato da un corpo puntiforme di massa m, il tutto incernierato in modo da potersi muovere esclusivamente su un piano verticale:

Il modello matematico con lo stato si ottiene dal modello ingresso uscita dato da:

Ponendo:

il modello presenta la seguente forma matriciale:
![\begin{bmatrix}\dot{x}_{1}\\ \dot{x}_{2}\end{bmatrix}=\begin{bmatrix}x_{2}\\ \frac{1}{ml^{2}}[-mgl\text{sin}(x_{1})-bx_{2}+lu]\end{bmatrix}](/mediawiki/images/math/9/1/3/91351bd132bf78bf48e89bf87924f3d2.png)
Per la [5] avremo  , quindi nell'intervallo
, quindi nell'intervallo  il pendolo possiede stati di equilibrio di due tipi diversi:
il pendolo possiede stati di equilibrio di due tipi diversi:

per cui il pendolo è comunque fermo, ma per valori pari di i è orientato verso il basso, mentre per valori dispari di i è orientato verso l'alto.
3. Movimento
Un concetto strettamente legato a quello di equilibrio è il movimento; di seguito diamo due definizioni basilari che, integrate alla Definizione 2.1, ci consentiranno di analizzare la proprietà di stabilità in modo completo.
- Definizione 3.1 - Si dice traiettoria nominale corrispondente allo stato iniziale
 e all'ingresso
e all'ingresso  , l'insieme degli stati ottenuti dalla [1]:
, l'insieme degli stati ottenuti dalla [1]:
![\left \{ \mathbf{x} \in \mathbf{X}:\mathbf{x}(t)=\boldsymbol{\varphi}(t,t_{0},\mathbf{x}_{0}^{*},\mathbf{u^{*}}_{[t_{0},t)})] \right \}\,\,\,\,\,\,\,\,\,\,\,\,[7]](/mediawiki/images/math/8/3/1/831bbb759bce29f2a04afeb3960cee26.png)
- Definizione 3.2 - Si dice movimento nominale corrispondente allo stato iniziale e all'ingresso , l'insieme delle coppie ordinate
 ottenute dalla [1] così composto:
ottenute dalla [1] così composto:
![\left \{ (t,\mathbf{x}) \in \mathbf{T} \times \mathbf{X}:\mathbf{x}(t)=\boldsymbol{\varphi}(t,t_{0},\mathbf{x}_{0}^{*},\mathbf{u^{*}}_{[t_{0},t)})] \right \}\,\,\,\,\,\,\,\,\,\,\,\,[8]](/mediawiki/images/math/8/7/1/871e1662c3a60d865ed30905a7466d65.png)
4. Stabilità secondo Lyapunov
Una trattazione rigorosa della nozione di stabilità fu proposta alla fine del XIX secolo dal matematico russo A.M. Lyapunov; in buona sostanza essa richiede che a piccole perturbazioni dello stato iniziale in cui si trova un sistema corrispondano piccole perturbazioni del movimento dello stato, eventualmente destinate ad annullarsi su tempi lunghi.
Riprendendo l'esempio della biglia, supponiamo che lo stato iniziale sia di quiete (biglia ferma nell'origine) e la perturbazione di questo stato sia un una piccola spinta impressa con il dito indice ad esempio: l'effetto è il movimento della biglia che inizierà ad oscillare attorno alla posizione di equilibrio fino a fermarsi a causa della forza d'attrito che avrà annullato, dopo un certo intervallo temporale, la perturbazione del movimento. Che succede però ad una biglia posta su un piano convesso come in Fig.3, sottoposta alla stessa perturbazione dello stato iniziale?
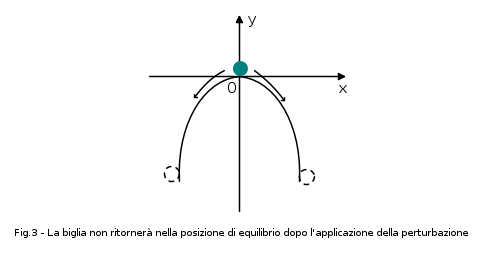
Certamente la biglia cadrà dall'una o dall'altra parte senza più tornare nella posizione di partenza a meno di un'azione manuale esterna che la riporti alla configurazione iniziale. Intuitivamente diremo quindi che il primo sistema è stabile, il secondo invece è instabile in quanto, a parità di perturbazione dello stato iniziale, nel primo caso viene raggiunta una nuova condizione di equilibrio (in questo esempio coincidente con quella iniziale), nel secondo non si raggiunge alcun equilibrio ma addirittura si assiste ad un'accelerazione della biglia, per effetto della forza peso non compensata dalla forza d'attrito del piano.
E' chiaro che stiamo analizzando un esempio banalissimo dal momento che nei sistemi reali complessi lo stato iniziale è il più delle volte o ignoto, o non misurabile, o entrambe le situazioni; ci fa però capire come la stabilità sia una proprietà connessa imprescindibilmente alle caratteristiche intrinseche del sistema.
Conferiamo adesso un pò più di rigore formale a quanto constatato intuitivamente.
4.1 Stabilità dell'equilibrio
Stiamo considerando al solito un sistema dinamico tempo invariante dove, per semplicità analitica, si suppone sottoposto ad un ingresso nullo. Diamo quindi la seguente
- Definizione 4.1 - Uno stato di equilibrio si dice stabile secondo Lyapunov se per ogni
 reso piccolo arbitrariamente, esiste un
reso piccolo arbitrariamente, esiste un  , dipendente in generale sia da
, dipendente in generale sia da  che dall'istante iniziale
che dall'istante iniziale  , tale che per tutti gli stati iniziali
, tale che per tutti gli stati iniziali  soddisfacenti la relazione
soddisfacenti la relazione

- risulti

- dove

La quantità  prende il nome di perturbazione iniziale, mentre la risposta libera nello stato
prende il nome di perturbazione iniziale, mentre la risposta libera nello stato  è definita evoluzione perturbata. Commentiamo il significato di questa definizione: la stabilità dello stato di equilibrio nominale richiede che il movimento perturbato rimanga "vicino" ad esso, cioè che tutte le infinite perturbazioni generabili nell'intorno di raggio δ sviluppino evoluzioni perturbate che restino limitate nell'intorno di raggio
è definita evoluzione perturbata. Commentiamo il significato di questa definizione: la stabilità dello stato di equilibrio nominale richiede che il movimento perturbato rimanga "vicino" ad esso, cioè che tutte le infinite perturbazioni generabili nell'intorno di raggio δ sviluppino evoluzioni perturbate che restino limitate nell'intorno di raggio  :
:

Va da sé che uno stato di equilibrio si dice instabile se non è stabile secondo la Definizione 4.1; quindi l'instabilità implica che esistono perturbazioni arbitrariamente piccole dello stato iniziale che provocano l'allontanamento dello stato del sistema dell'equilibrio stesso:

La Definizione 4.1 è riformulabile imponendo una condizione più forte: ossia che il movimento perturbato non solo debba essere limitato per istanti di tempo molto grandi, ma che debba anche tendere all'equilibrio nominale per  . Ciò è specificato dalla seguente:
. Ciò è specificato dalla seguente:
- Definizione 4.2 - Uno stato di equilibrio si dice asintoticamente stabile secondo Lyapunov se esso è stabile secondo la Definizione 4.1 e se comunque scelto un istante , esiste un intorno di raggio
 tale che tutte le infinite perturbazioni iniziali che appartengono a tale intorno, ingenerino evoluzioni perturbate limitate in un intorno di e convergenti asintoticamente ad per . In formule
tale che tutte le infinite perturbazioni iniziali che appartengono a tale intorno, ingenerino evoluzioni perturbate limitate in un intorno di e convergenti asintoticamente ad per . In formule

Per inciso, osserviamo che la convergenza asintotica della risposta nello stato all'equilibrio nominale avviene nella norma  , dal momento che le grandezze trattate sono dei vettori appartenenti allo spazio di stato (che in questo contesto è uno spazio vettoriale lineare a tutti gli effetti e, in quanto tale, in esso è definito un prodotto scalare e quindi una norma). Graficamente si ha:
, dal momento che le grandezze trattate sono dei vettori appartenenti allo spazio di stato (che in questo contesto è uno spazio vettoriale lineare a tutti gli effetti e, in quanto tale, in esso è definito un prodotto scalare e quindi una norma). Graficamente si ha:

Esempio 2
Si consideri la seguente rete elettrica a parametri concentrati rappresentata da una semplice connessione serie R-C:
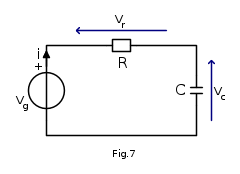
Applicando una LKT otteniamo la relazione:

Le relazioni costitutive sono:


Se adesso poniamo  ,
,  ,
,  (avendo scelto come risposta del sistema la tensione ai capi del resistore), sostituiamo nell'equazione di maglia e svolgiamo qualche semplice passaggio algebrico, perveniamo alla rappresentazione implicita della rete data:
(avendo scelto come risposta del sistema la tensione ai capi del resistore), sostituiamo nell'equazione di maglia e svolgiamo qualche semplice passaggio algebrico, perveniamo alla rappresentazione implicita della rete data:
![\dot{x}(t)=\frac{1}{RC}[u(t)-x(t)]](/mediawiki/images/math/c/a/1/ca12494686a205baecbb99c2d6439345.png)

Se poniamo  , lo stato di equilibrio ottenuto annullando
, lo stato di equilibrio ottenuto annullando  è esattamente
è esattamente  , cui corrisponde l'uscita di equilibrio
, cui corrisponde l'uscita di equilibrio  : L'interpretazione fisica di questo risultato è che, quando tutte le variabili in gioco del circuito sono costanti, il condensatore si comporta come un circuito aperto e pertanto la corrente nella maglia e la tensione ai capi del resistore sono nulle, mentre la tensione ai capi del condensatore coincide con quella presente ai morsetti del generatore. Dall'equazione di stato deduciamo che il movimento perturbato relativo allo stato iniziale
: L'interpretazione fisica di questo risultato è che, quando tutte le variabili in gioco del circuito sono costanti, il condensatore si comporta come un circuito aperto e pertanto la corrente nella maglia e la tensione ai capi del resistore sono nulle, mentre la tensione ai capi del condensatore coincide con quella presente ai morsetti del generatore. Dall'equazione di stato deduciamo che il movimento perturbato relativo allo stato iniziale  è:
è:

pertanto

e quindi, in base alla Definizione 4.1, se si desidera che risulti:

è sufficiente prendere  visto che per
visto che per  avremo:
avremo:

Lo stato di equilibrio  è quindi stabile ed anche asintoticamente stabile dal momento che:
è quindi stabile ed anche asintoticamente stabile dal momento che:

come è noto. Questo risultato si ricollega con quanto constato intuitivamente con l'esempio iniziale: il sistema è stabile perché la perturbazione dello stato iniziale si estingue per tempi lunghi (che interpretiamo come esaurimento del transitorio) raggiungendo una nuova situazione di equilibrio (che interpretiamo come l'instaurarsi del regime permanente, ovvero  ).
).
4.2 Osservazioni sull'equilibrio stabile
Nelle definizioni date sopra, abbiamo visto come, in generale, gli scalari  e
e  siano dipendenti dall'istante di tempo con la possibile conseguenza che per certi valori temporali essi assumano dei valori molto piccoli (riducendo quindi il margine entro il quale annullare l'effetto della perturbazione); in ambito ingegneristico è piuttosto richiesto che gli intorni di raggio e risultino indipendenti da : in questo caso parleremo di stabilità e/o asintotica stabilità uniforme (proprietà sempre valida per i sistemi stazionari).
siano dipendenti dall'istante di tempo con la possibile conseguenza che per certi valori temporali essi assumano dei valori molto piccoli (riducendo quindi il margine entro il quale annullare l'effetto della perturbazione); in ambito ingegneristico è piuttosto richiesto che gli intorni di raggio e risultino indipendenti da : in questo caso parleremo di stabilità e/o asintotica stabilità uniforme (proprietà sempre valida per i sistemi stazionari).
Sempre nel contesto ingegneristico applicativo, è altresì fondamentale la capacità che deve avere un sistema nel reagire alle perturbazioni sullo stato iniziale annullandone gli effetti in modo asintotico, indipendentemente dall'entità delle perturbazioni a cui è sottoposto. In tali condizioni il sistema si dice globalmente asintoticamente stabile; in altri termini, è richiesto che i movimenti perturbati generati da un qualunque stato iniziale, "vicino" o "lontano" allo stato di equilibrio nominale, convergano tutti al medesimo equilibrio nominale, rendendo di fatto irrilevante l'entità della perturbazione. Certamente ciò non costituisce il caso generale in quanto, in corrispondenza di un certo ingresso fissato, il sistema potrebbe essere dotato di più stati di equilibrio ciascuno con differente attitudine alla stabilità; però, per ognuno di quelli che sono nella fattispecie asintoticamente stabili, esisterà comunque un opportuno insieme di stati iniziali che generano movimenti perturbati asintoticamente convergenti allo stato di equilibrio stesso: tale insieme prende comunemente il nome di regione di attrazione.
4.3 Stabilità del movimento
Le considerazioni sulla stabilità dell'equilibrio nominale sono generalizzabili sostituendo ad esso un generico movimento nominale. Si può quindi dare la seguente:
- Definizione 4.3 - Un movimento nominale
 si dice stabile se, per ogni , esiste uno scalare tale che per tutti gli stati iniziali che soddisfano la relazione
si dice stabile se, per ogni , esiste uno scalare tale che per tutti gli stati iniziali che soddisfano la relazione

- risulti

La proprietà di stabilità del movimento quindi ci dice che, scelta arbitrariamente piccola la massima distanza accettabile in un qualunque istante di tempo tra il movimento perturbato e quello nominale, quest'ultimo è stabile allorché la condizione su tale distanza è rispettata, pur di prendere lo stato iniziale del movimento perturbato sufficientemente prossimo a quello del movimento nominale. Viceversa, banalmente, diremo che il movimento nominale è instabile:

Per finire, analogamente a quanto è stato fatto per l'equilibrio nominale, anche per il movimento la proprietà di stabilità è rafforzabile richiedendo che il movimento perturbato tenda a quello nominale per  in base alla seguente:
in base alla seguente:
- Definizione 4.4 - Un movimento si dice asintoticamente stabile se, per ogni esiste un opportuno
 tale che risulti stabile secondo la Definzione 4.3 ed inoltre
tale che risulti stabile secondo la Definzione 4.3 ed inoltre

Graficamente:

Bibliografia
[1] Appunti e dispense del corso di Controlli Automatici tenuto presso la facoltà di Ingegneria Elettronica dell'Università degli Studi di Palermo;
[2] P.Bolzern, R.Scattolini, N.Schiavoni - Fondamenti di controlli automatici - 2008.

